本文介绍: 机器人电机综述,包含了常用的机器人电机知识
电机综述
图片与部分素材来自知乎大佬不看后悔!最全的电机分类,看这一篇就够了! – 知乎 (zhihu.com),本文只是把机器人中常用的电机知识提炼了一下
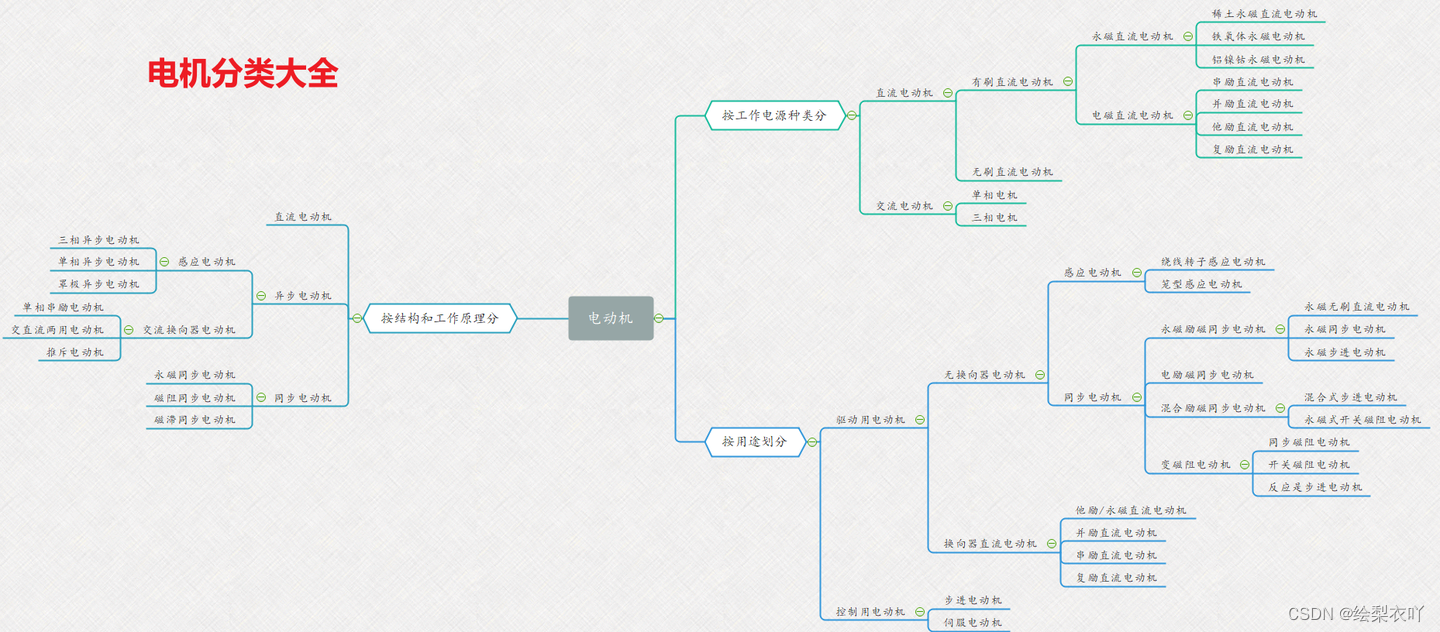
1 按照结构和工作原理划分
1. 同步电机
电机的转速与定子磁场的转速相同步
2. 异步电机
电机转速达不到定子磁场的同步转速
2 按工作电源分类
3 按电机用途划分
4 舵机
5 步进电机与伺服电机
6 物理性质
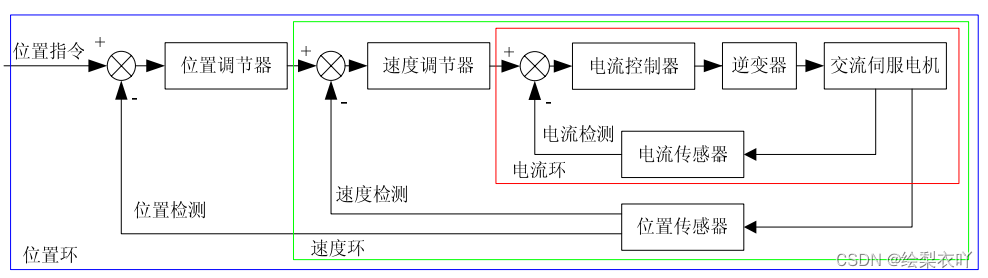
7 伺服系统控制
声明:本站所有文章,如无特殊说明或标注,均为本站原创发布。任何个人或组织,在未征得本站同意时,禁止复制、盗用、采集、发布本站内容到任何网站、书籍等各类媒体平台。如若本站内容侵犯了原著者的合法权益,可联系我们进行处理。