本文介绍: 本文仅供学习使用B站:DR_CAN。
1. Recursive Algirithm 递归算法



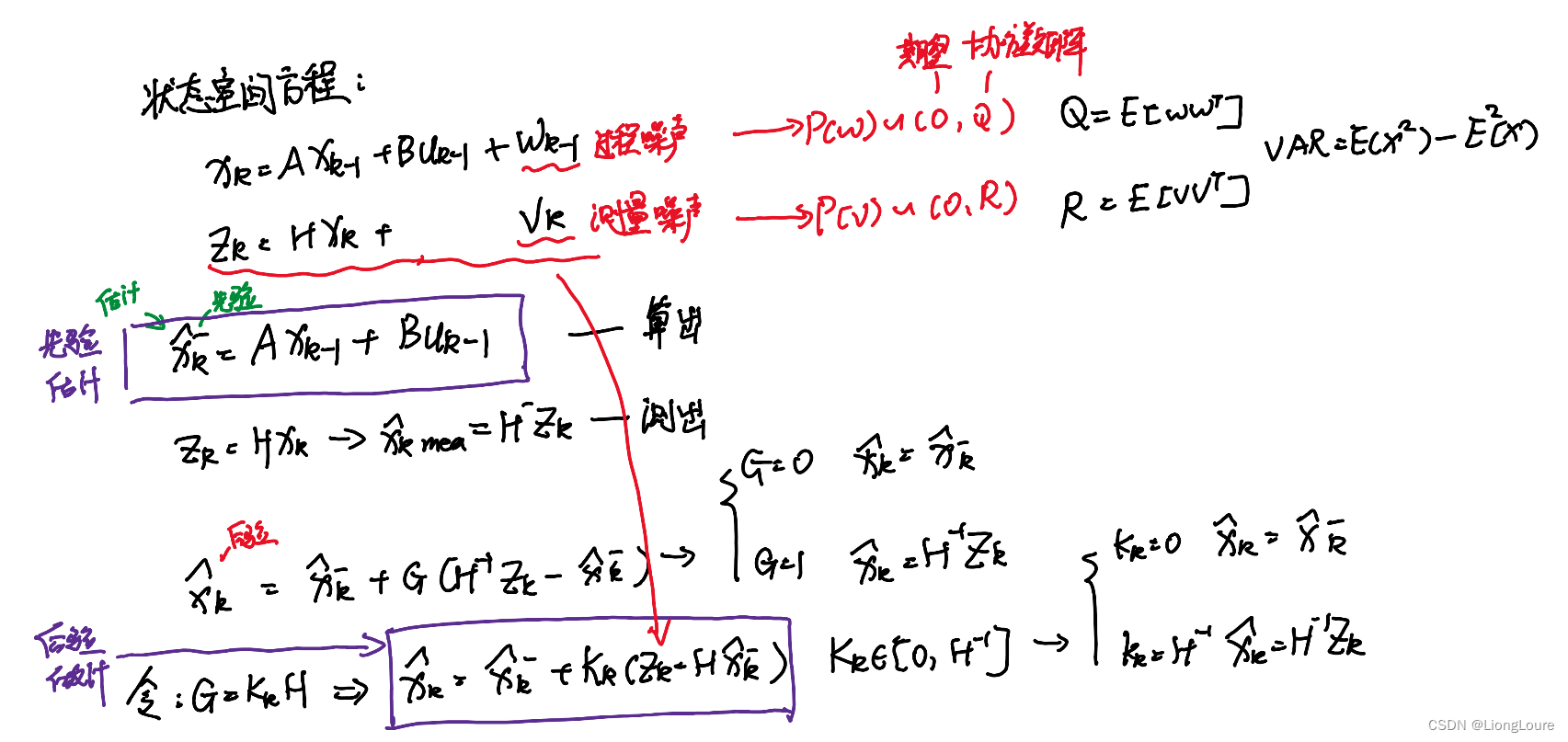
2. Data Fusion 数据融合Covarince Matrix协方差矩阵State Space状态空间方程 Observation观测器




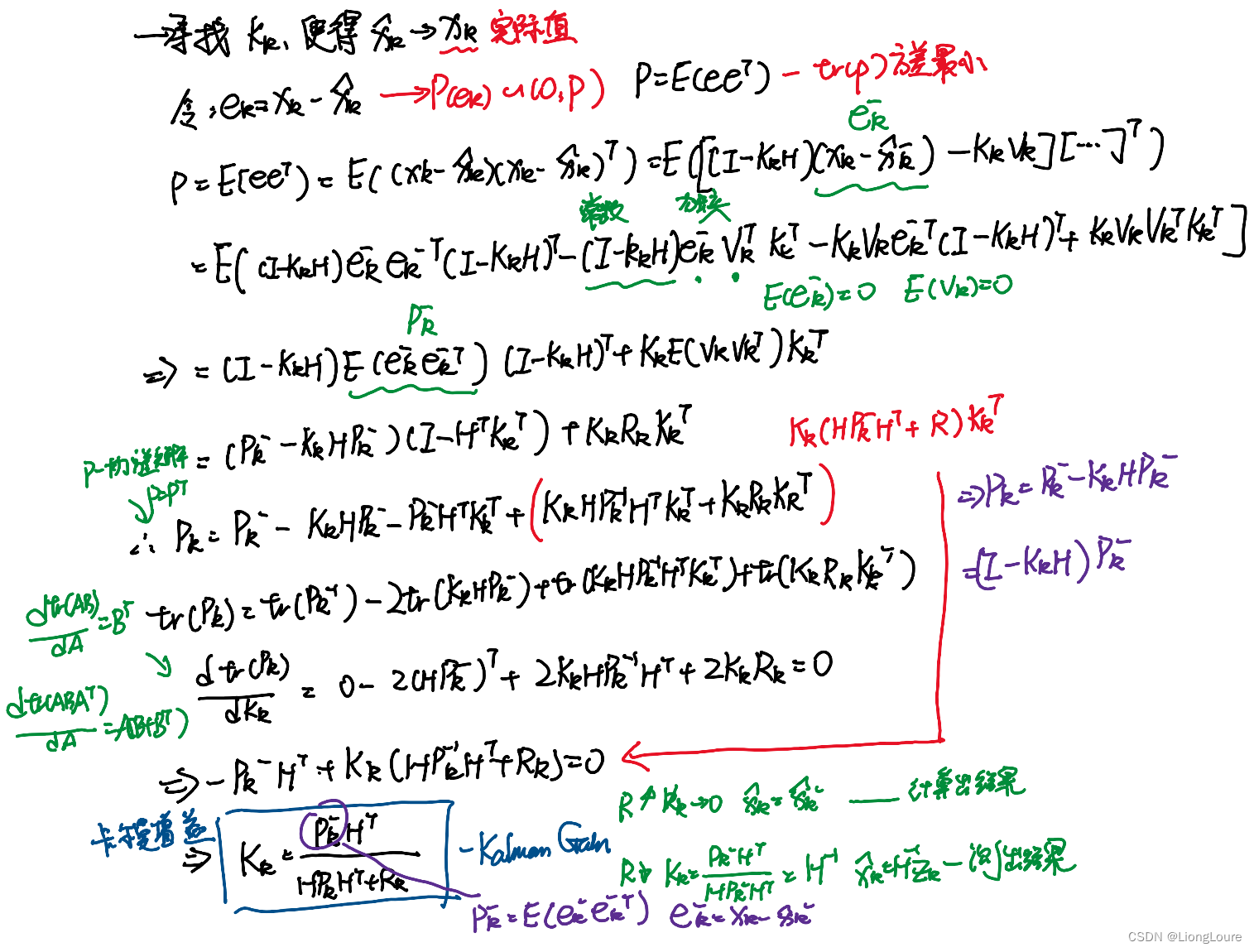
3. Step by step : Deriation of Kalmen Gain 卡尔曼增益/因数 详细推导
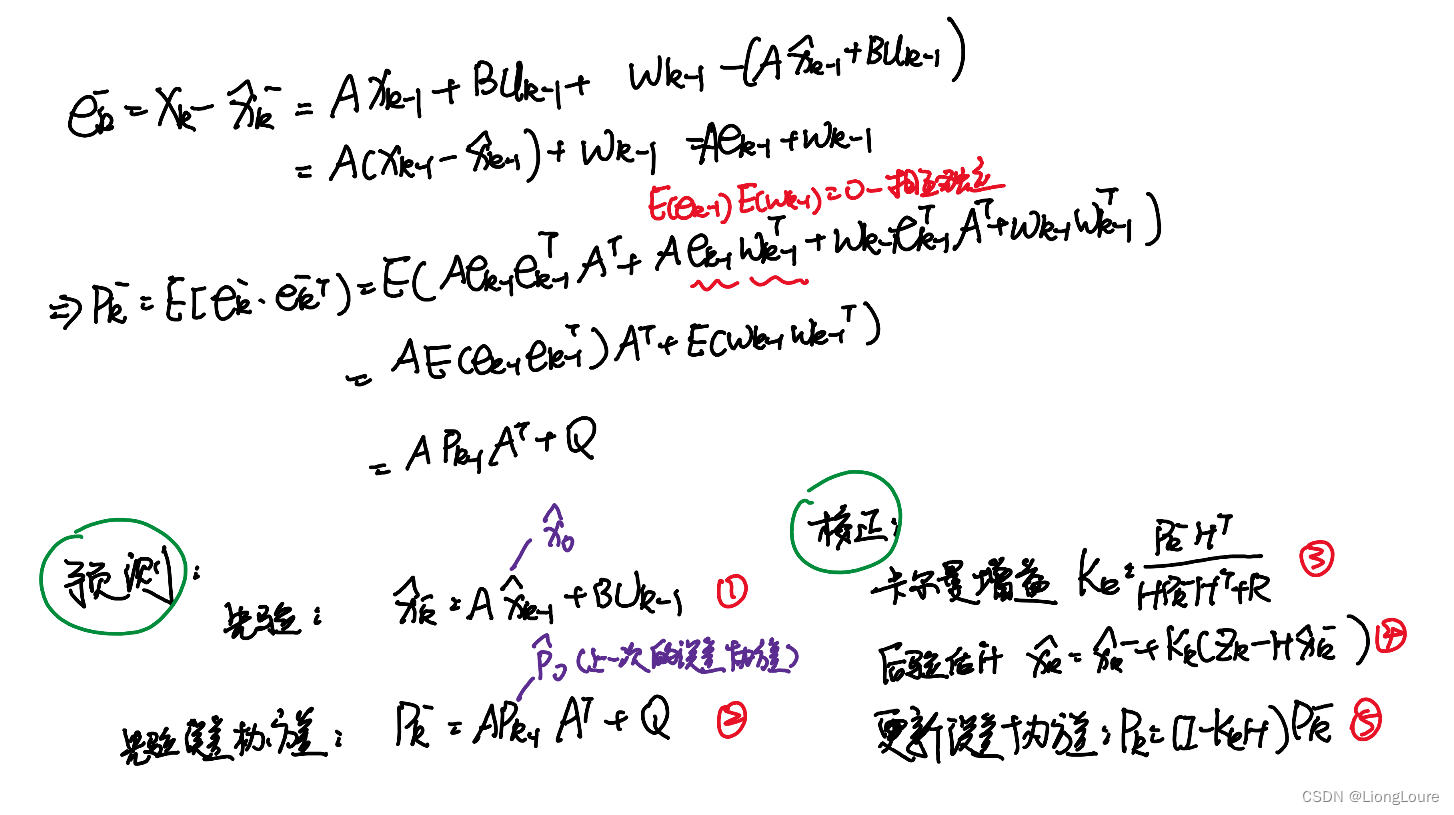
4. Priori/Posterrori error Covariance Martix 误差协方差矩阵
5. An Example 2D例子


6. Extended Kalman Filter扩展卡尔曼滤波器(EKF)



声明:本站所有文章,如无特殊说明或标注,均为本站原创发布。任何个人或组织,在未征得本站同意时,禁止复制、盗用、采集、发布本站内容到任何网站、书籍等各类媒体平台。如若本站内容侵犯了原著者的合法权益,可联系我们进行处理。