本文介绍: 最近由于公司部门即将撤销,开始了新一轮准备。发现现在整体行情不太乐观,很看重过去是干啥的经验。比如之前做L2功能算法有涉及到规划的知识,以及说明了自己做demo和自学了知识,包括和控制重合的也有非线性优化的知识,想转去做L3的乘用车的行车规划,想做小弟抱大腿不求工资,却难度不小。同时本次面试我coding环节答得不好,(其实也是半年前大家问的比较简单)。准备时间大约3周多,自己刷题的时候感觉中等题目给自己,时间不紧张的话,三道题可出两道的样子。但是实际考试的时候,甚至大半年前的做过的题目还忘记了。
写在前面
最近由于公司部门即将撤销,开始了新一轮准备。
总之,感觉这一次精力发散,很多新学习的东西都想去做,消耗量时间和精力来准备,行情不好的时候,我这样的初级工程师总归还是先做好本行,伺机待发不断学习。
考题
业务(这里只非个人强项目相关,通用知识)
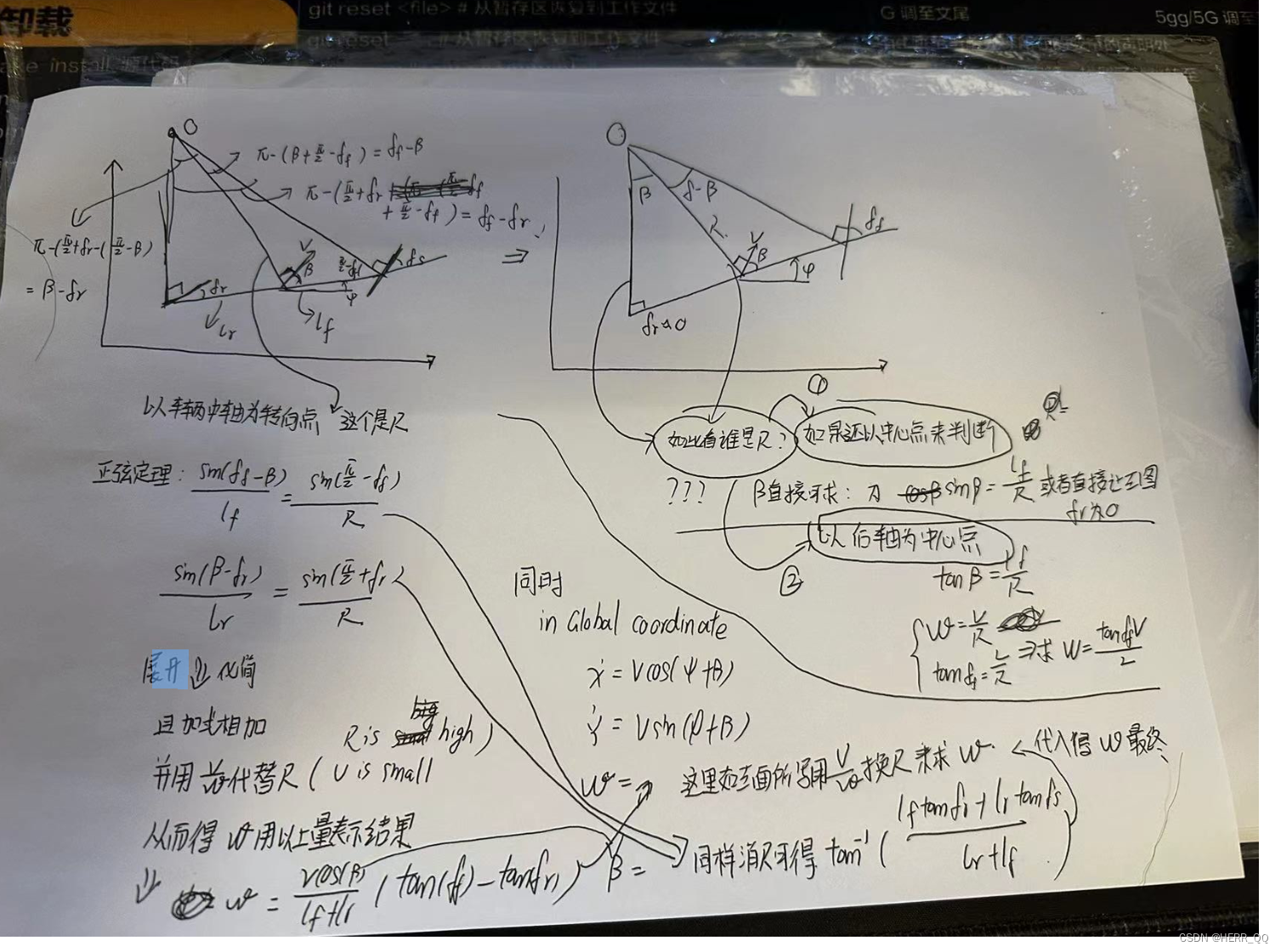
被考到了运动学模型,以转向中心在车上为考题,我推理的还是太死板,见左,考试的时候考了右边简化了后轮转角,但是这样有一个问题,b(beta)可以直接计算了,同时转向中心看起来也以后轮计算比较合理了,所以直接迷糊。想回忆原来的算法直接带公式然后后轮看成0,但是发现这样其实直接就可以计算了。
修改: 后来重新看书 如果按照以车质心为转向同时忽略后轮转向角度的模型也是可以的,这时候并不一定要把半径从后轮延长。只不过是一句话带过了,那么还是按照左边求法,直接然后忽略后轮转角即可。或者同时由于忽略了后轮转角,角boc就是纯b,所以通过tan(前轮转角)=ob/ab 求出ob,再用勾股求出oc即为转弯半径。 同时b也可求出了。 有了r的同时我们还有v,所以i也可求出来w了。

图片来源 Vehicle Dynamics and Control 第二版 p15
其他问题:
coding
总体感觉在中等里的中等水平但是scope很广,估计继续面试还能遇到新的考察点
八股
其他
声明:本站所有文章,如无特殊说明或标注,均为本站原创发布。任何个人或组织,在未征得本站同意时,禁止复制、盗用、采集、发布本站内容到任何网站、书籍等各类媒体平台。如若本站内容侵犯了原著者的合法权益,可联系我们进行处理。