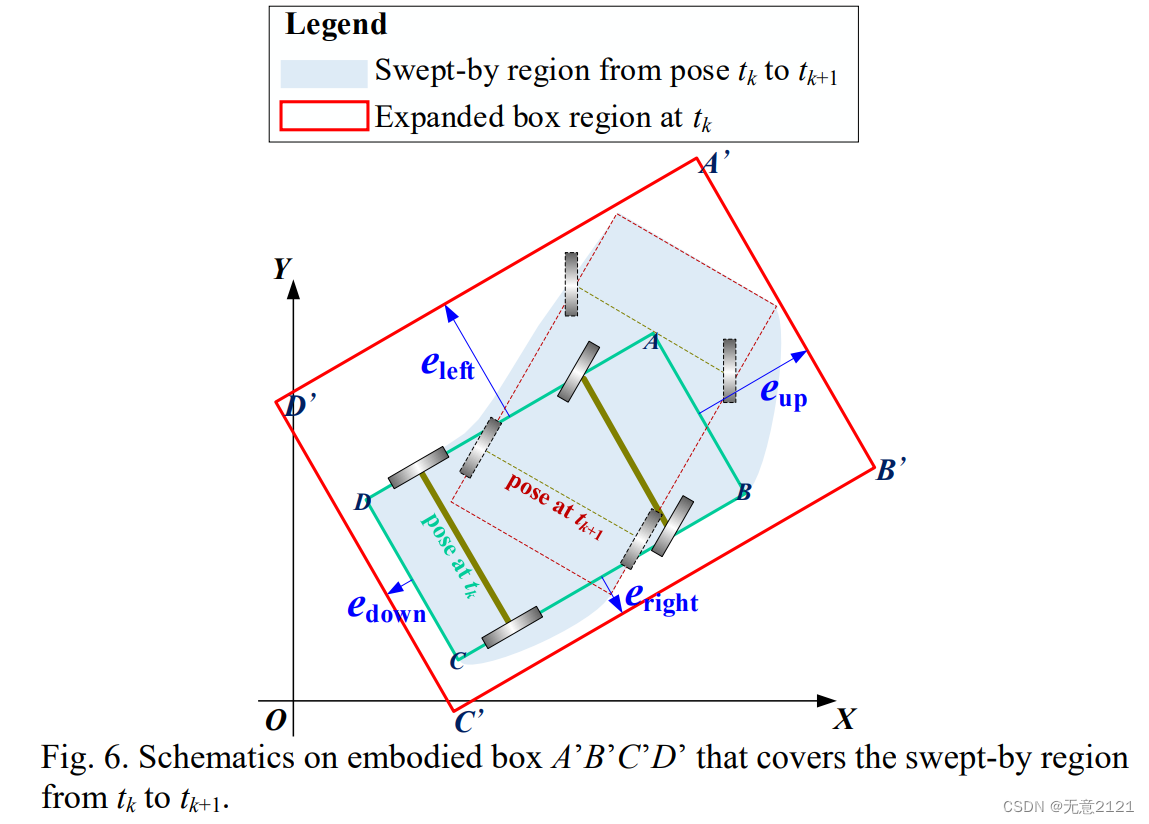
本文介绍: 而具身足迹的意思则是在两个离散点之间自动驾驶汽车自身所覆盖的足迹,这并不是一个新的概念,计算机图形学中的扫掠体与这个具身足迹的意义相同。李柏老师用矩形框去近似具身足迹,也就实现了连续碰撞检测,但是有些保守,不适合狭窄空间,但是安全性较好,具体结合曲率去分析这个具身足迹的性质可以参考原文
欢迎大家关注我的B站:
偷吃薯片的Zheng同学的个人空间-偷吃薯片的Zheng同学个人主页-哔哩哔哩视频 (bilibili.com)
目录
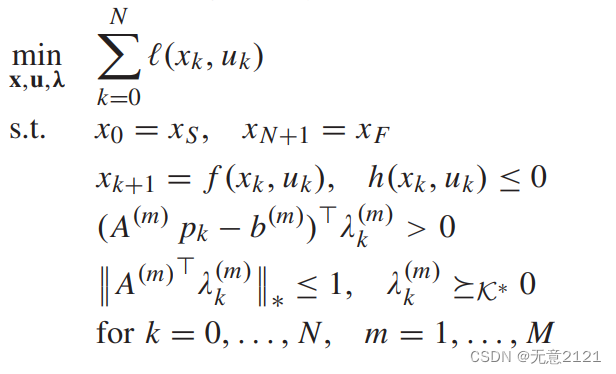
1.基于凸优化


2.具身足迹


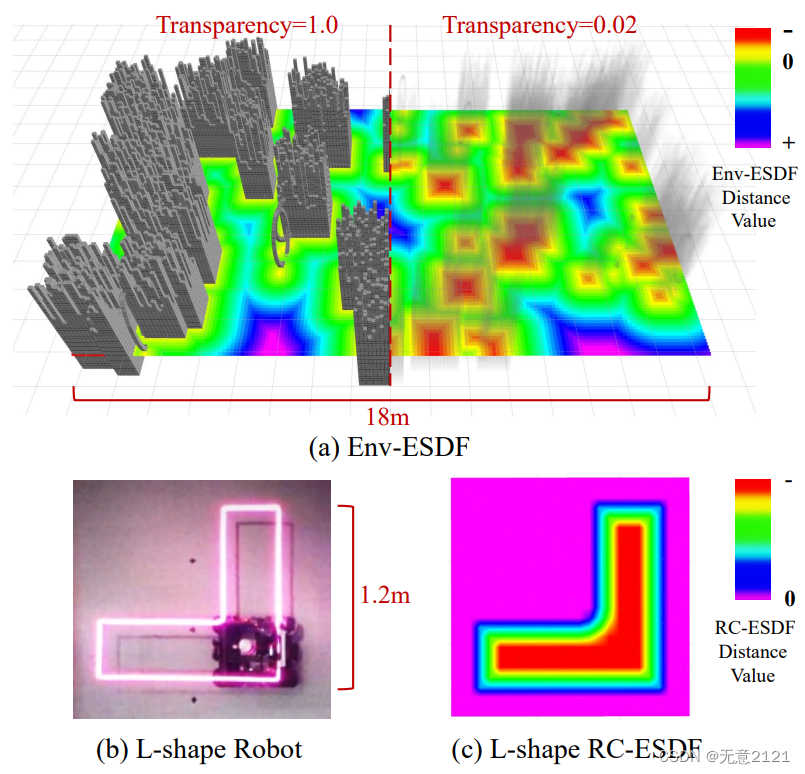
3. ESDF
声明:本站所有文章,如无特殊说明或标注,均为本站原创发布。任何个人或组织,在未征得本站同意时,禁止复制、盗用、采集、发布本站内容到任何网站、书籍等各类媒体平台。如若本站内容侵犯了原著者的合法权益,可联系我们进行处理。



![[软件工具]文档页数统计工具软件pdf统计页数word统计页数ppt统计页数图文打印店快速报价工具](https://img-blog.csdnimg.cn/direct/09dfbaff3e9a47a9a551dd65fef5d482.jpeg)