本文介绍: 广东外语外贸大学–自然语言处理。基于HMM+维特比算法的词性标注。词性标注是一种自然语言处理技术,用于识别文本中每个词的词性,例如名词、动词、形容词等;词性标注也被称为语法标注或词类消疑,是语料库语言学中将语料库内单词的词性按其含义和上下文内容进行标记的文本数据处理技术;
自然语言处理作业2–基于HMM+维特比算法的词性标注
一、理论描述
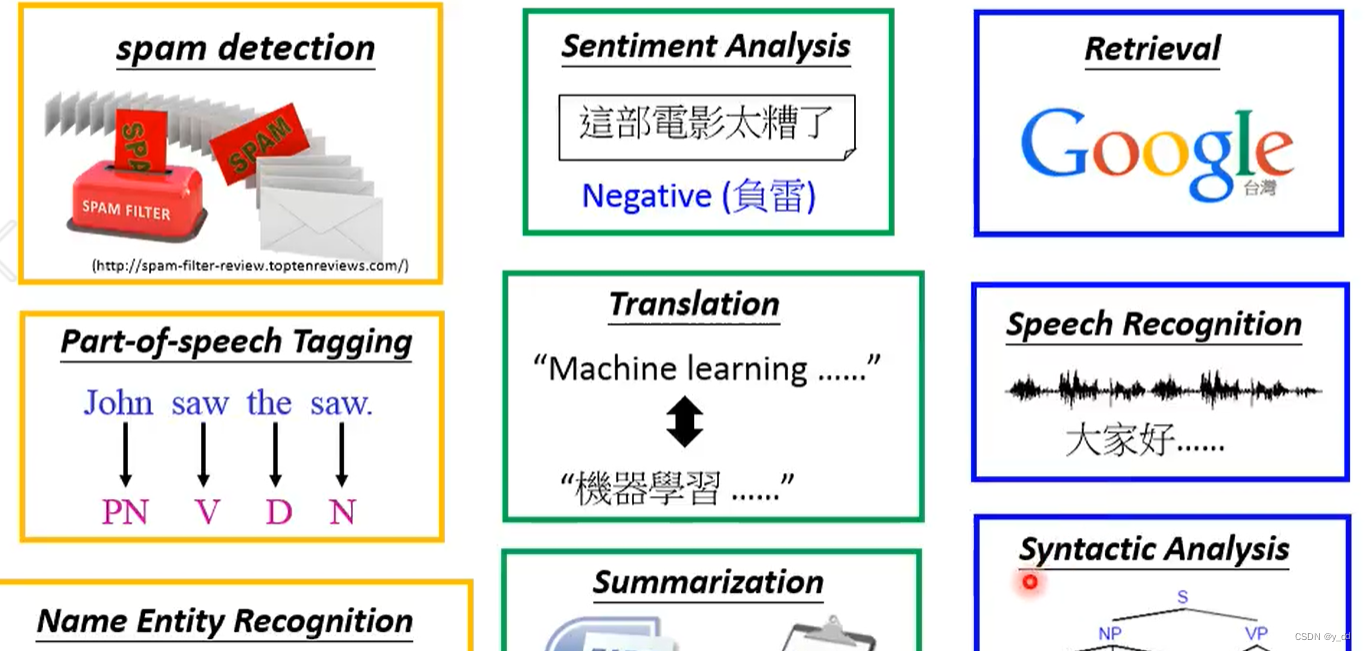
词性标注是一种自然语言处理技术,用于识别文本中每个词的词性,例如名词、动词、形容词等;
词性标注也被称为语法标注或词类消疑,是语料库语言学中将语料库内单词的词性按其含义和上下文内容进行标记的文本数据处理技术;
词性标注可以由人工或特定算法完成,使用机器学习方法实现词性标注是自然语言处理的研究内容。常见的词性标注算法包括隐马尔可夫模型、条件随机场等;
词性标注是对文本进行语言学分析的重要工具,可以帮助计算机理解和处理自然语言文本。通过词性标注,计算机可以更准确地理解句子的结构和含义,从而实现诸如信息抽取、文本分类、句法分析等自然语言处理任务。它主要被应用于文本挖掘和NLP领域,是各类基于文本的机器学习任务(如语义分析、指代消解)的预处理步骤,是自然语言处理中一项非常重要的基础性工作。
二、算法描述
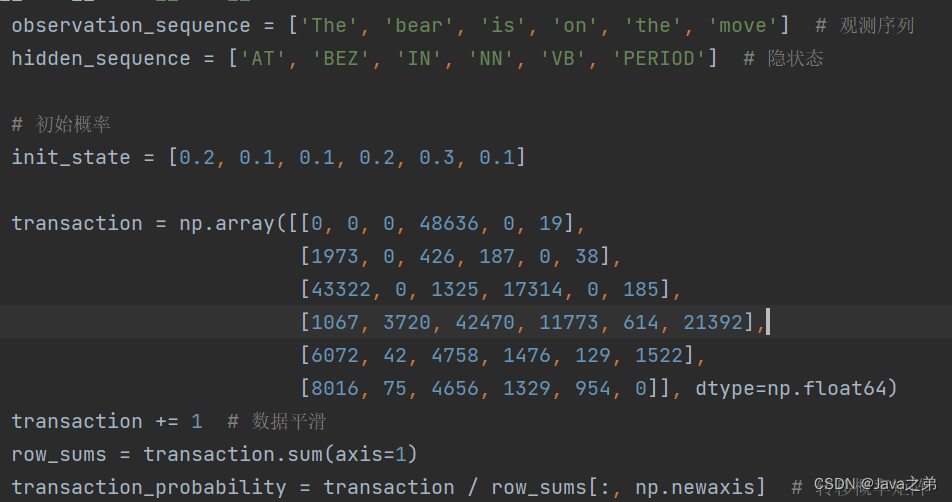
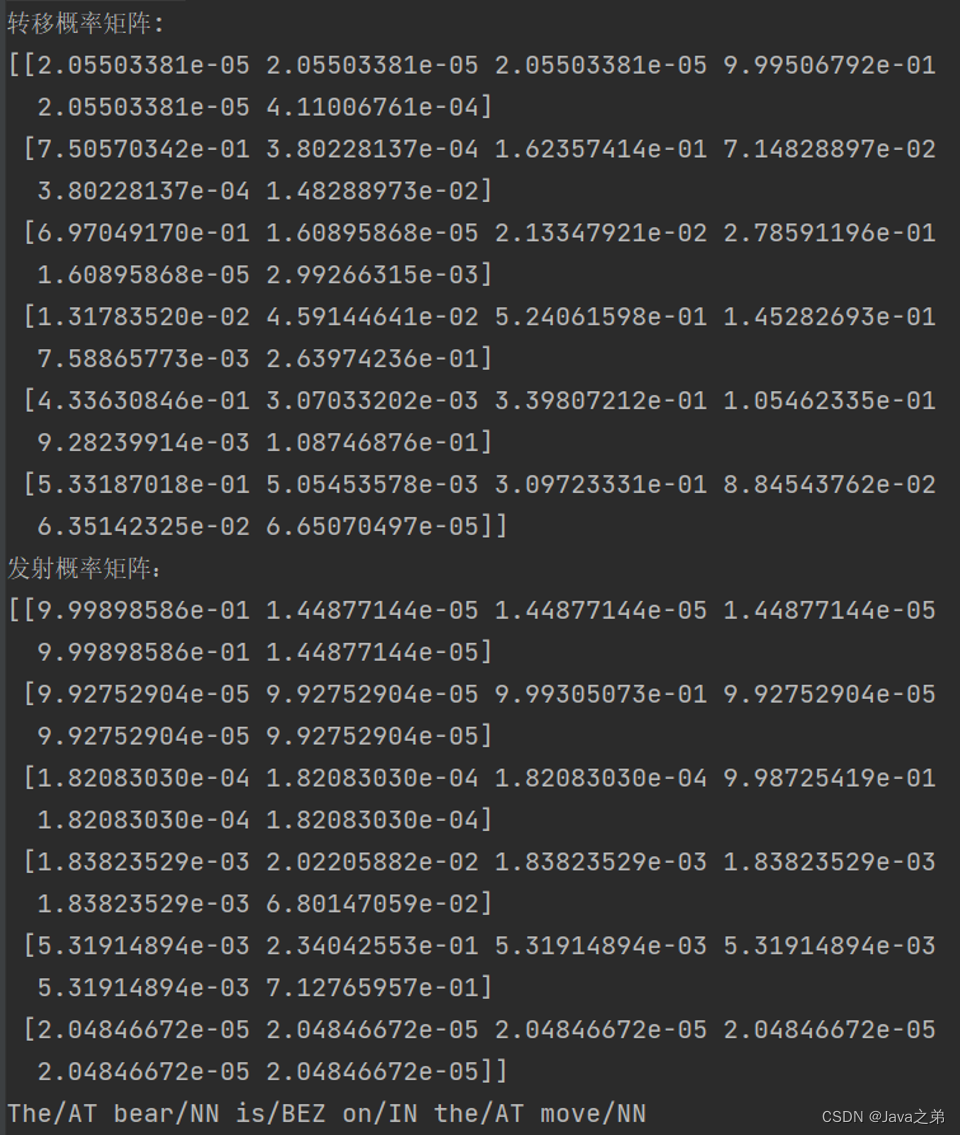
本文实现HMM+维特比算法,具体算法描述如下:
维特比算法是一种动态规划算法,通过计算每个观测节点的不同隐状态的最大概率,并记录路径,最终返回最大概率的路径
三、详细描述
四、软件演示
五、问题和总结
声明:本站所有文章,如无特殊说明或标注,均为本站原创发布。任何个人或组织,在未征得本站同意时,禁止复制、盗用、采集、发布本站内容到任何网站、书籍等各类媒体平台。如若本站内容侵犯了原著者的合法权益,可联系我们进行处理。