传统卷积神经网络,内存需求大、运算量大,导致无法在移动设备以及嵌入式设备上运行。
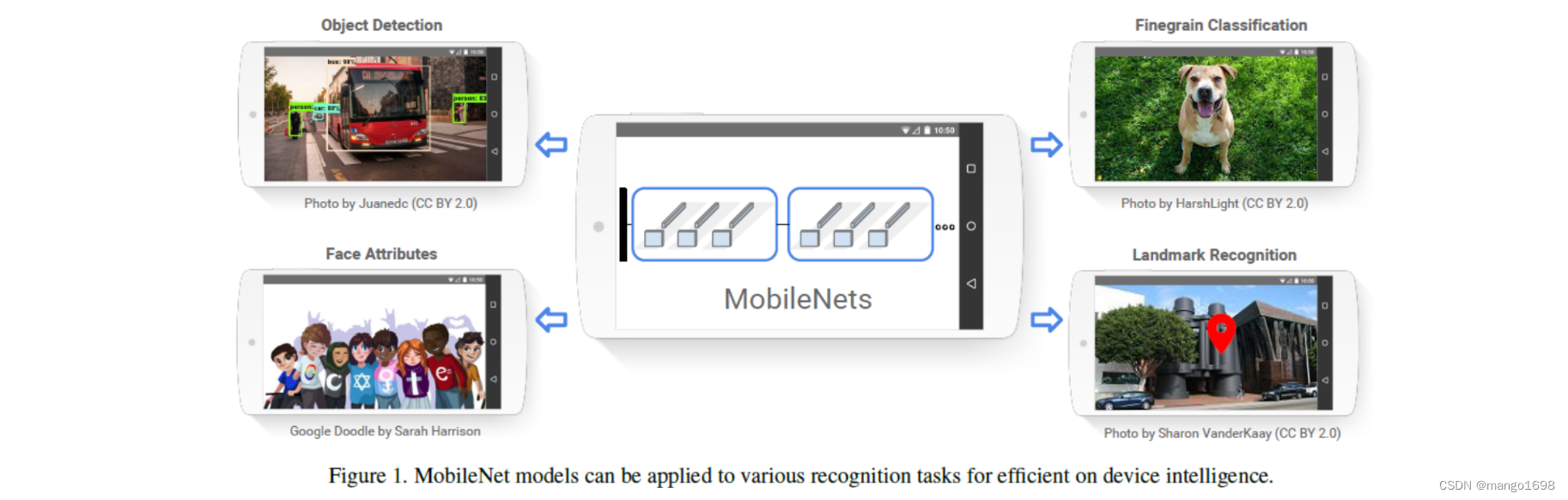
MobileNet网络是由google团队在2017年提出的,专注于移动端或者嵌入式设备中的轻量级CNN网络。相比传统卷积神经网络,在准确率小幅降低的前提下大大减少模型参数与运算量。(相比VGG16准确率减少了0.9%,但模型参数只有VGG的1/32)
1. MobileNet V1
论文:MobileNets: Efficient Convolutional Neural Networks for Mobile Vision Applications
网址:https://arxiv.org/abs/1704.04861
网络亮点:
- 深度可分离卷积(大大减少运算量和参数数量)
- 增加超参数,
控制卷积层卷积核个数的参数
α
和控制输出图像大小的参数
β
控制卷积层卷积核个数的参数alpha和控制输出图像大小的参数beta
控制卷积层卷积核个数的参数α和控制输出图像大小的参数β,这两个参数是手动设定的,并不是学习得来的
传统卷积
卷积核通道 = 输入特征矩阵通道
输出特征矩阵通道 = 卷积核个数
深度可分离卷积 Depthwise Separable Conv:DW Conv+PW Conv
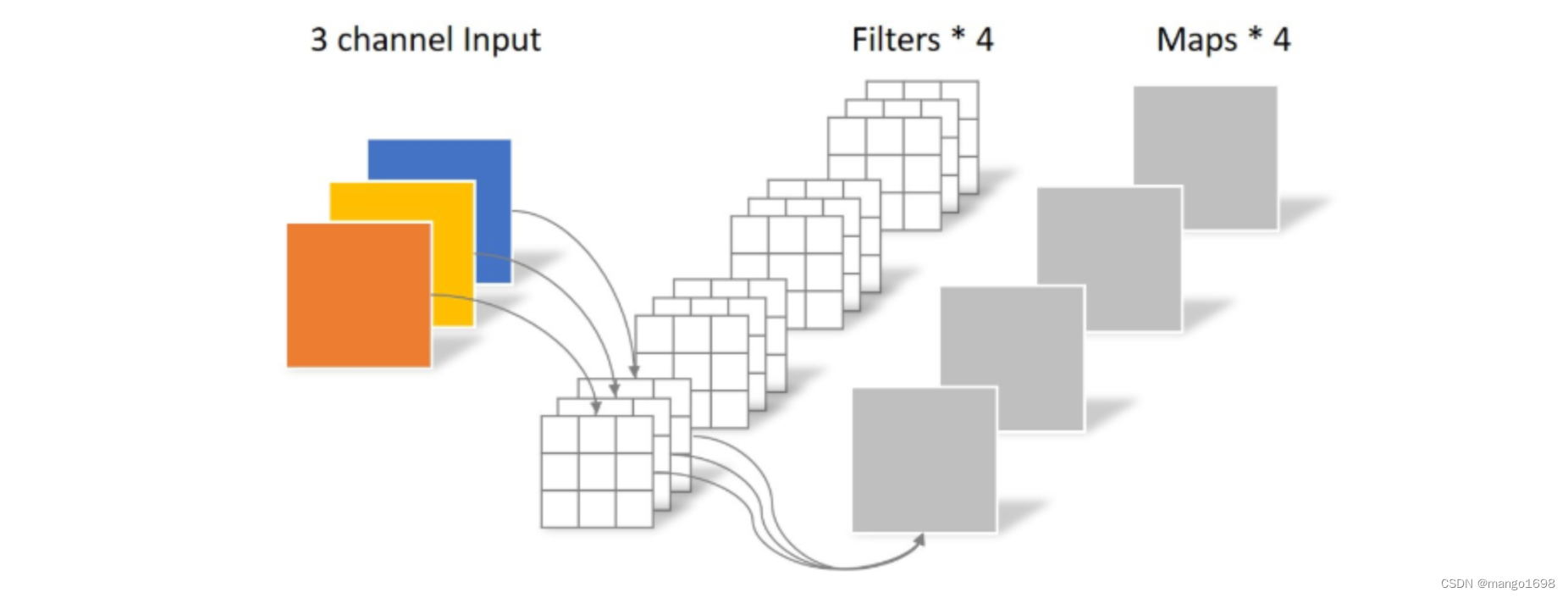
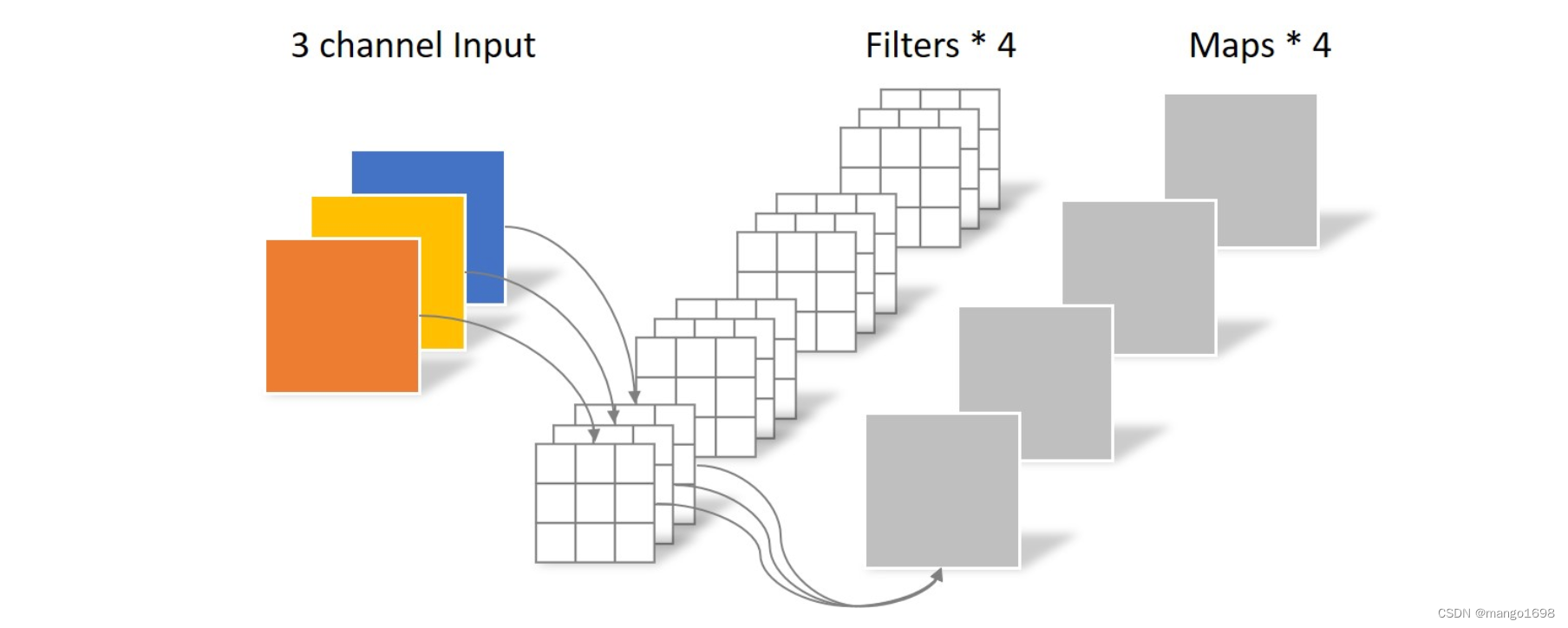
1.逐通道卷积 Depthwise Conv(DW Conv)
卷积核通道 = 1
输入特征矩阵通道 = 卷积核个数 = 输出特征矩阵通道
Depthwise Convolution的一个卷积核负责一个通道,一个通道只被一个卷积核卷积
一张
5
×
5
5times5
5×5像素、三通道彩色输入图片(shape为
5
×
5
×
3
5times5times3
5×5×3),Depthwise Convolution首先经过第一次卷积运算,DW完全是在二维平面内进行。卷积核的数量与上一层的通道数相同(通道和卷积核一一对应)。所以一个三通道的图像经过运算后生成了3个Feature map(如果有same padding则尺寸与输入层相同为
5
×
5
5times5
5×5),如下图所示。
其中一个Filter只包含一个大小为
3
×
3
3times3
3×3的Kernel,卷积部分的参数个数计算如下:
N
_
d
e
p
t
h
w
i
s
e
=
3
×
3
×
3
=
27
N_depthwise = 3times3 times3 = 27
N_depthwise=3×3×3=27
Depthwise Convolution完成后的Feature map数量与输入层的通道数相同,无法扩展Feature map。而且这种运算对输入层的每个通道独立进行卷积运算,没有有效的利用不同通道在相同空间位置上的feature信息。因此需要Pointwise Convolution来将这些Feature map进行组合生成新的Feature map。
DW部分的卷积核容易废掉,即卷积核参数大部分为0。
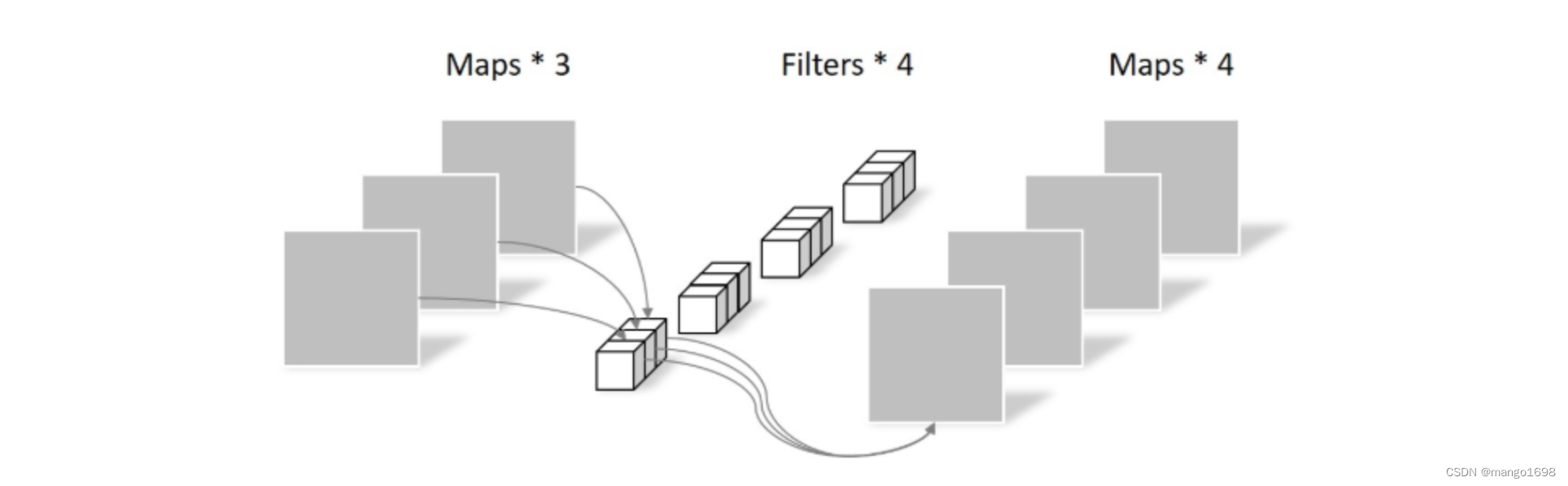
2.逐点卷积 Pointwise Conv (PW Conv)
Pointwise Convolution的运算与常规卷积运算非常相似,它的卷积核的尺寸为
1
×
1
×
M
1times1times M
1×1×M,M为上一层的通道数。所以这里的卷积运算会将上一步的map在深度方向上进行加权组合,生成新的Feature map。有几个卷积核就有几个输出Feature map。
理论上,普通卷积计算量是DW+PW的8到9倍。
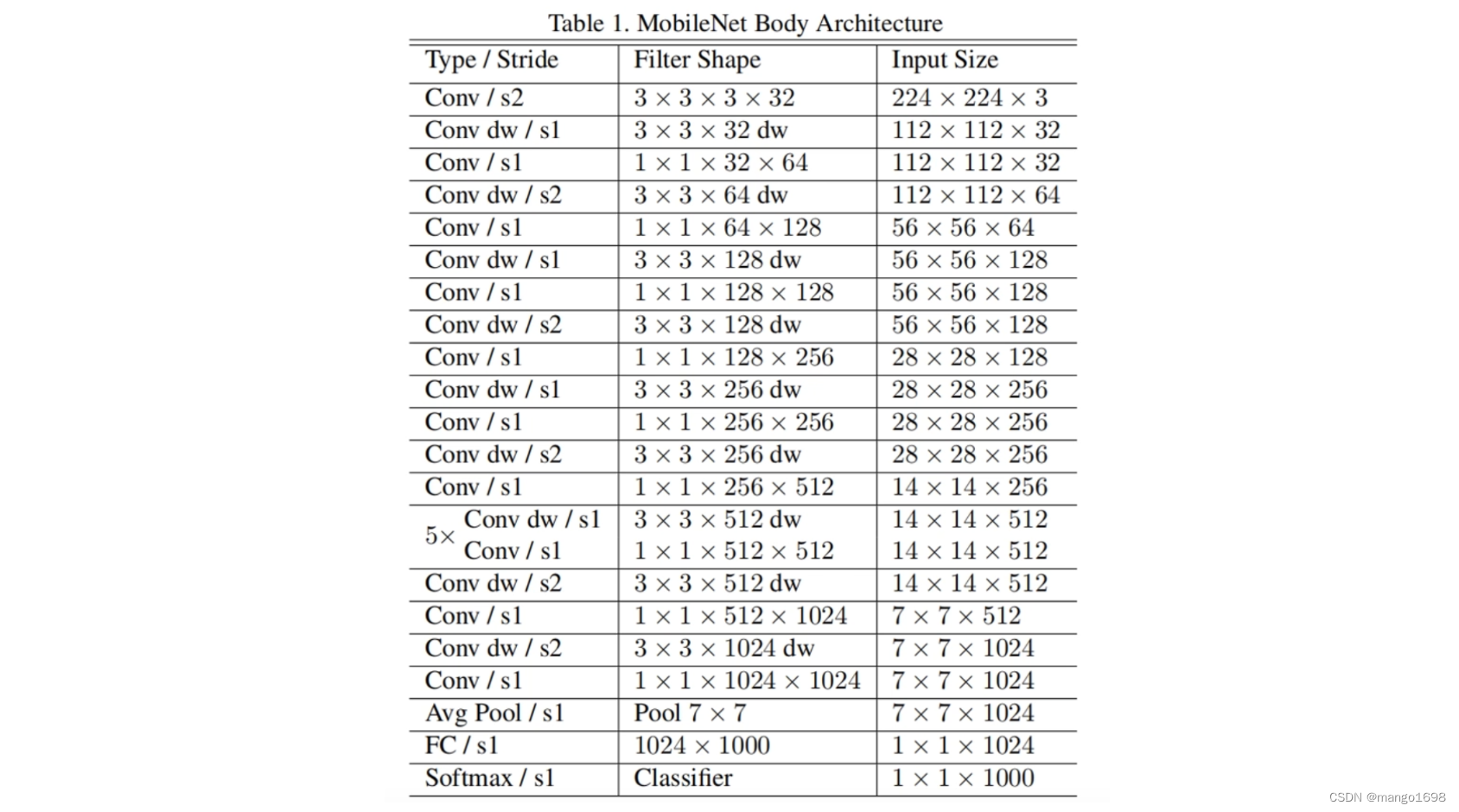
MobileNet V1网络结构
2. MobileNet V2
论文:MobileNetV2: Inverted Residuals and Linear Bottlenecks
网址:https://arxiv.org/abs/1801.04381
MobileNet V2网络是由google团队在2018年提出的,相比MobileNet V1网络,准确率更高,模型更小。
网络亮点:
- Inverted Residuals(倒残差结构)
- Liner Bottlenecks(线性瓶颈)
Resnet中的残差结构:(激活函数采用ReLU)
- 先使用
1
×
1
1times1
1×1的卷积核进行降维操作 - 再进行常规卷积操作
- 再使用
1
×
1
1times1
1×1的卷积核进行升维操作
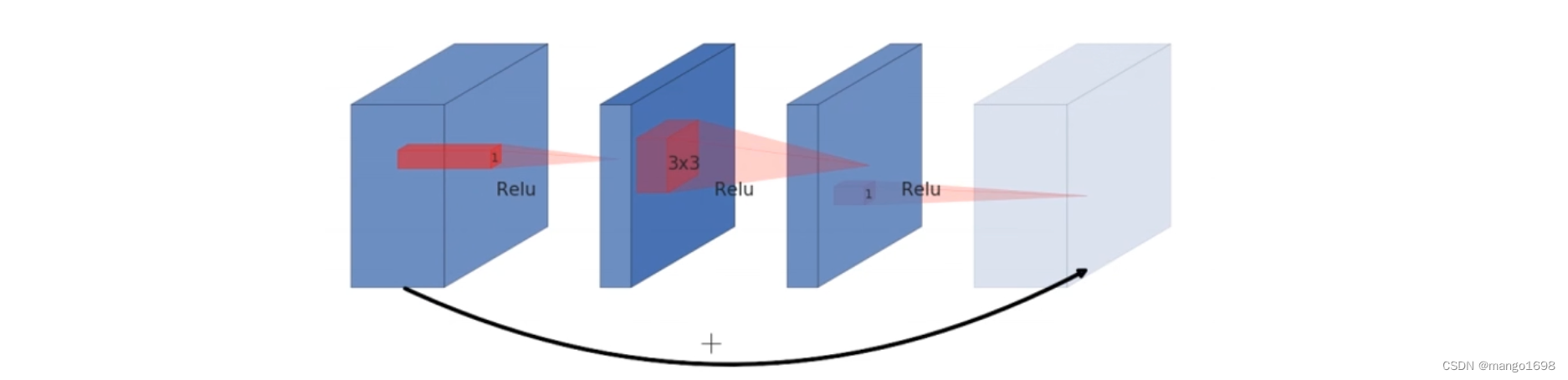
倒残差结构:(激活函数采用ReLU6)
- 先使用
1
×
1
1times1
1×1的卷积核进行升维操作 - 在进行DW(逐通道卷积)卷积
- 然后在使用
1
×
1
1times1
1×1的卷积核进行降维处理(PW逐点卷积)
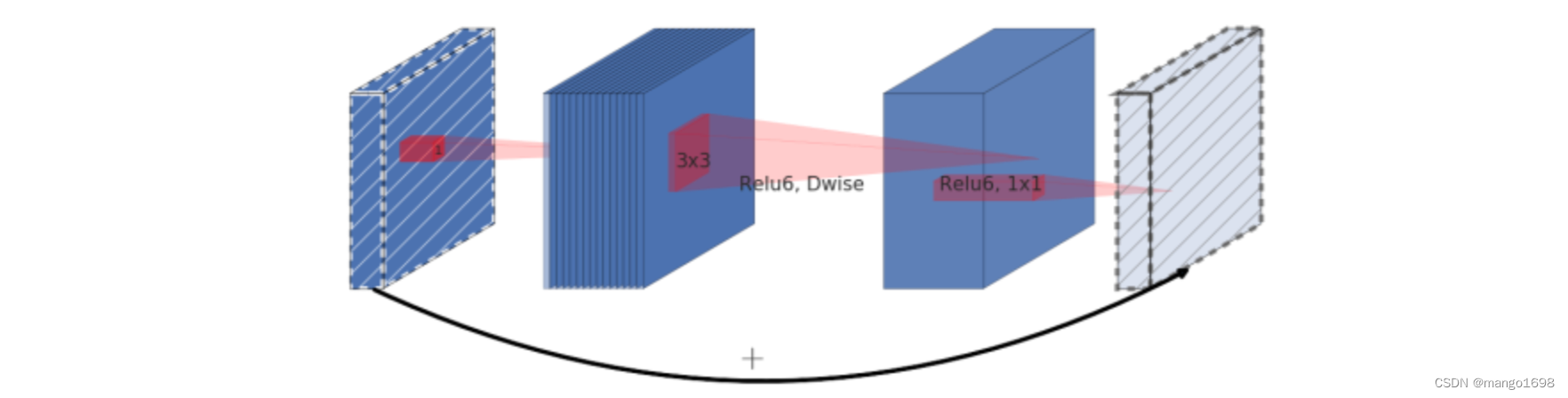
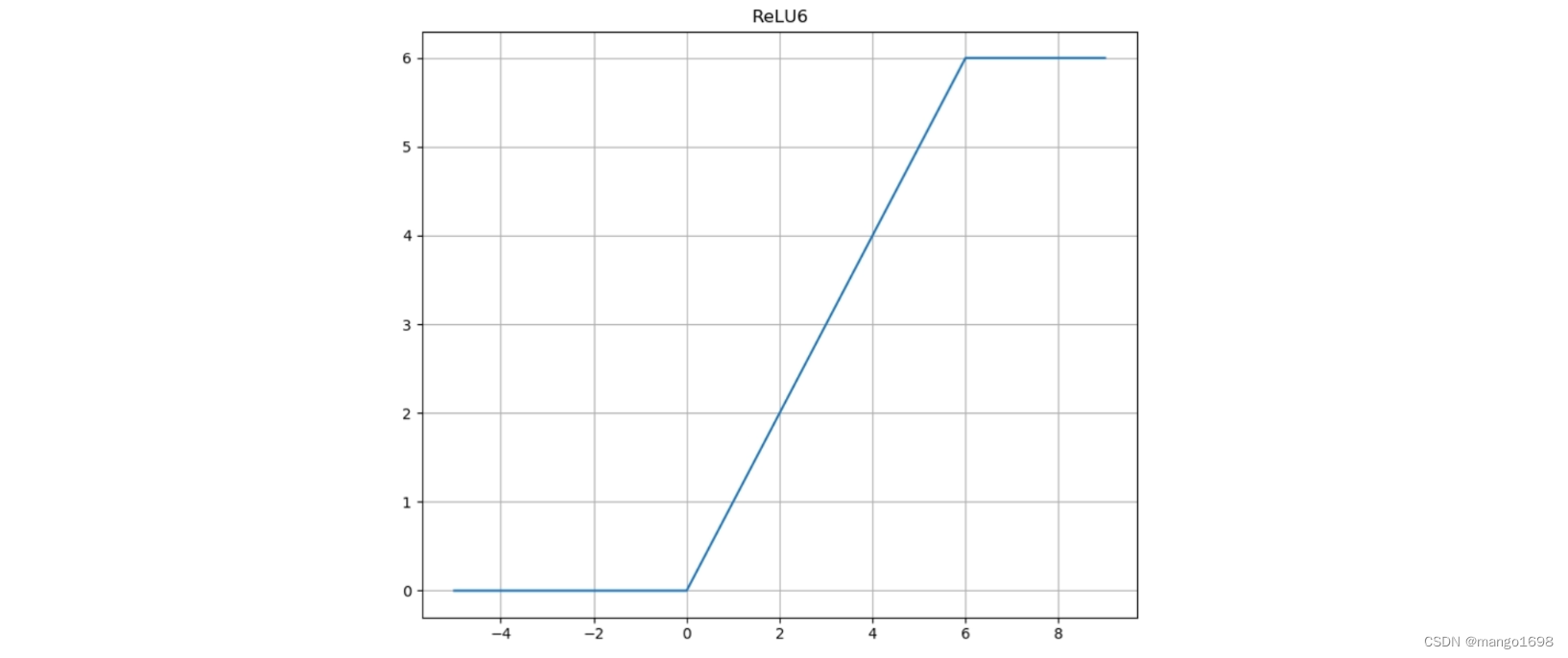
ReLU6激活函数:
y
=
R
e
L
U
6
(
x
)
=
m
i
n
(
m
a
x
(
x
,
0
)
,
6
)
y = ReLU6(x) = min(max(x,0),6)
y=ReLU6(x)=min(max(x,0),6)
Linear Bottlenecks (线性瓶颈)
先说瓶颈(Bottleneck),
1
×
1
1times1
1×1卷积小像个瓶口所以叫瓶颈,该词的来源是resnet的经典网络使用的词汇,当前的MobileNet v2依旧使用了该结构的block。
再说linear,如下图,从下往上看的,看最后的pointwise卷积,之前的pointwise卷积是升维的,轮到最后的pointwise卷积就是降维,设计该网的作者说高维加个非线性挺好,低维要是也加非线性就把特征破坏了,不如线性的好,所以1*1后不加ReLU6 ,改换线性。
针对倒残差结构的最后一个
1
×
1
1times1
1×1的卷积层,使用了线性激活函数,而非ReLU激活函数。
ReLU激活函数对低维特征信息造成大量损失
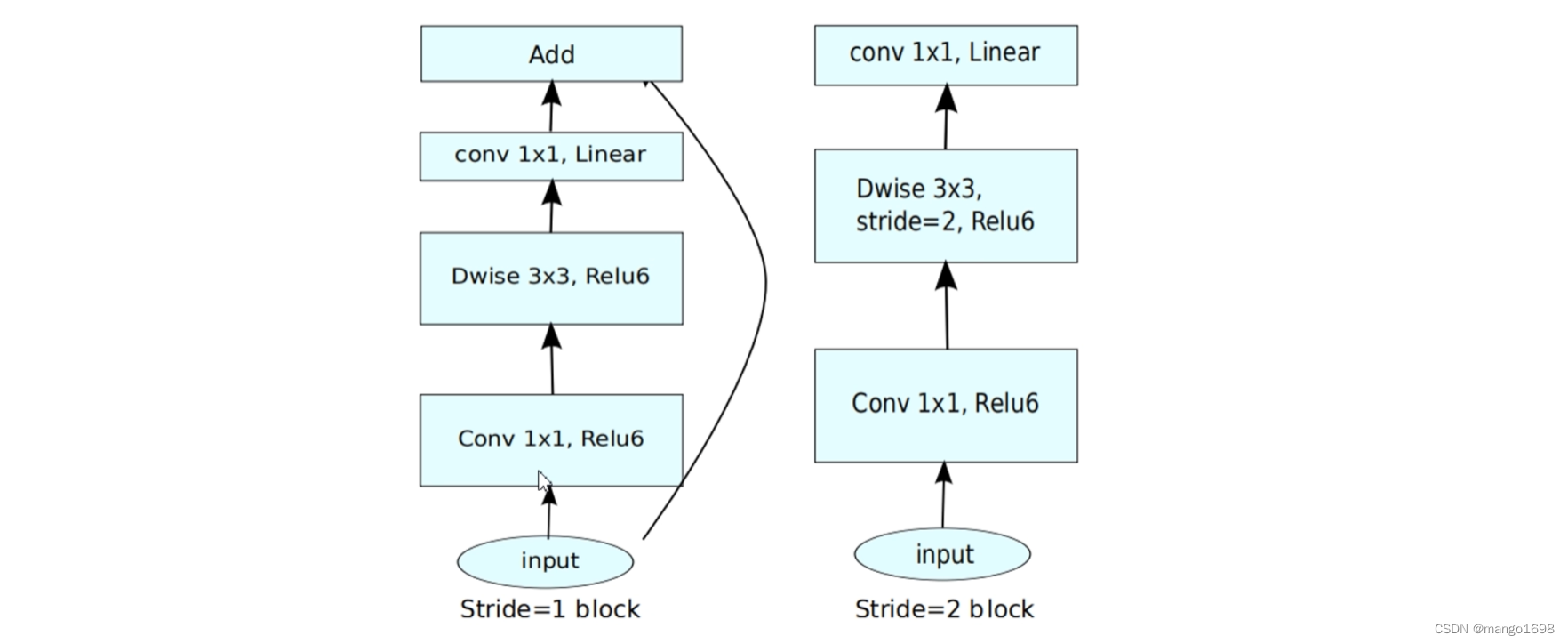
当stride=1且输入特征矩阵与输出特征矩阵shape相同时才有shortcut连接。
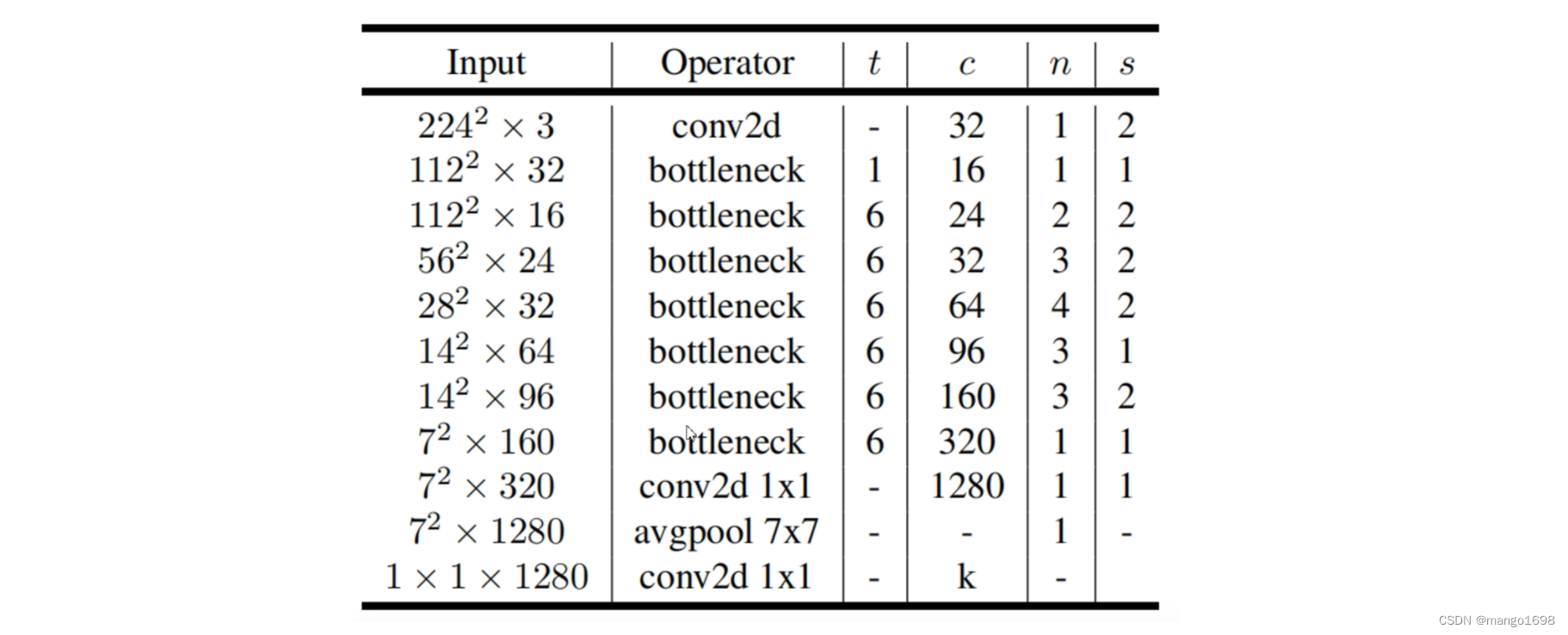
MobileNet V2网络结构
3. MobileNet V3
论文:Searching for MobileNetV3
网址:https://arxiv.org/abs/1905.02244
网络亮点:
- 更新Block(benck)
- 使用NAS搜索参数(Neural Architecture Search)
- 重新设计耗时层结构
更新Block
-
加入了SE模块(注意力机制)
-
更新了激活函数
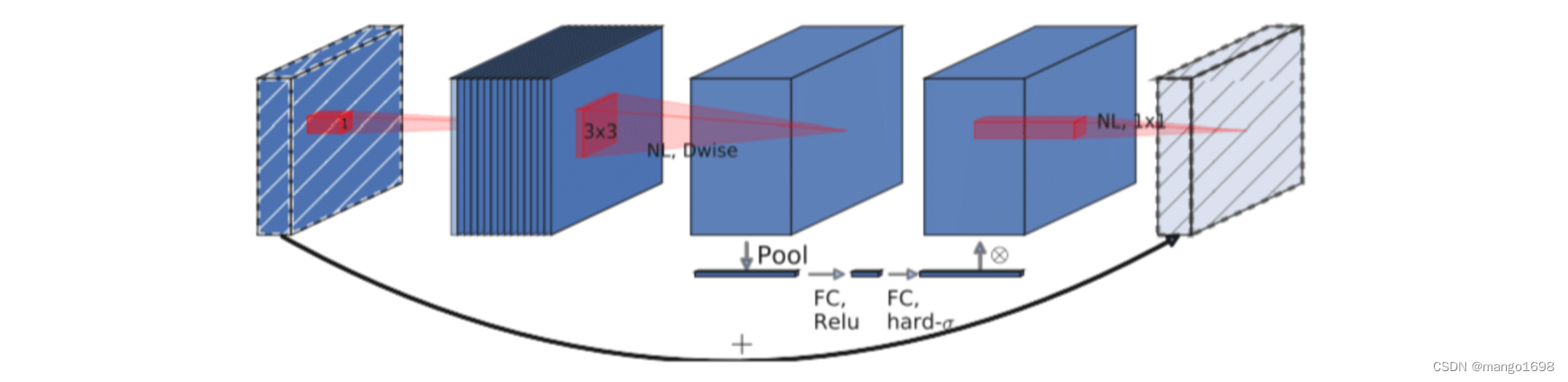
注意力机制部分:
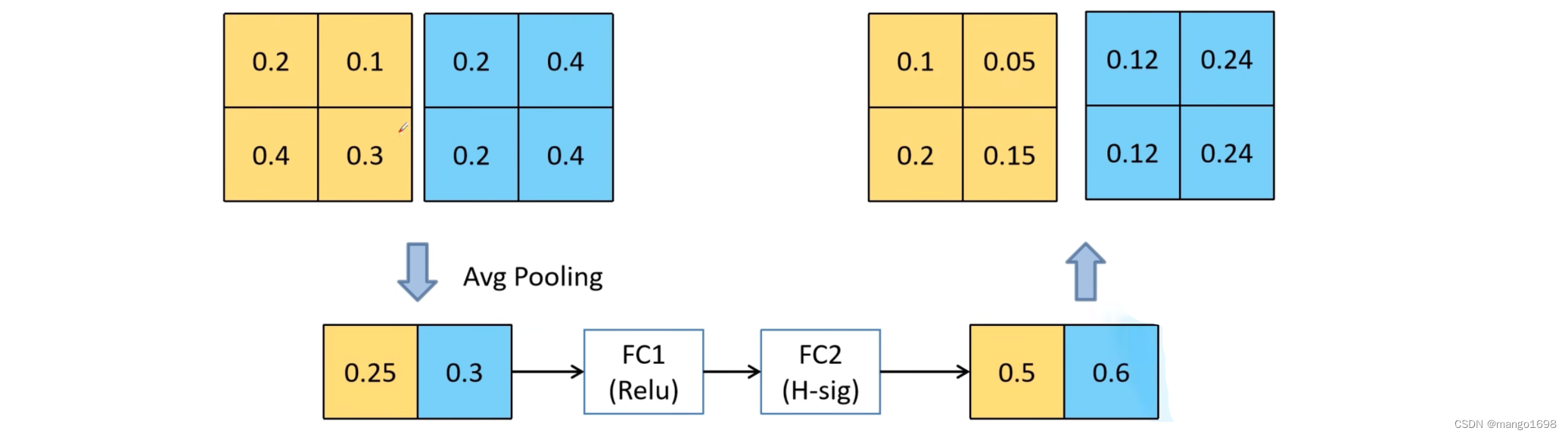
H-sig:Hard-sigmoid激活函数
重新设计激活函数:
使用swish激活函数,公式如下。
s
w
i
s
h
(
x
)
=
x
⋅
σ
(
x
)
σ
(
x
)
=
1
1
+
e
−
x
swish(x) = x·sigma(x)\ sigma(x) = frac{1}{1+e^{-x}}
swish(x)=x⋅σ(x)σ(x)=1+e−x1
σ
(
x
)
sigma(x)
σ(x)为sigmoid激活函数。
swish激活函数计算、求导复杂,对量化过程不友好,因此,作者提出了h-swish激活函数。
R
e
L
U
6
(
x
)
=
m
i
n
(
m
a
x
(
x
,
0
)
,
6
)
ReLU6(x) = min(max(x,0),6)
ReLU6(x)=min(max(x,0),6)
h
−
s
i
g
m
o
i
d
=
R
e
L
U
6
(
x
+
3
)
6
h-sigmoid = frac{ReLU6(x+3)}{6}
h−sigmoid=6ReLU6(x+3)
h
−
s
w
i
s
h
(
x
)
=
x
R
e
L
U
6
(
x
+
3
)
6
h-swish(x) = xfrac{ReLU6(x+3)}{6}
h−swish(x)=x6ReLU6(x+3)
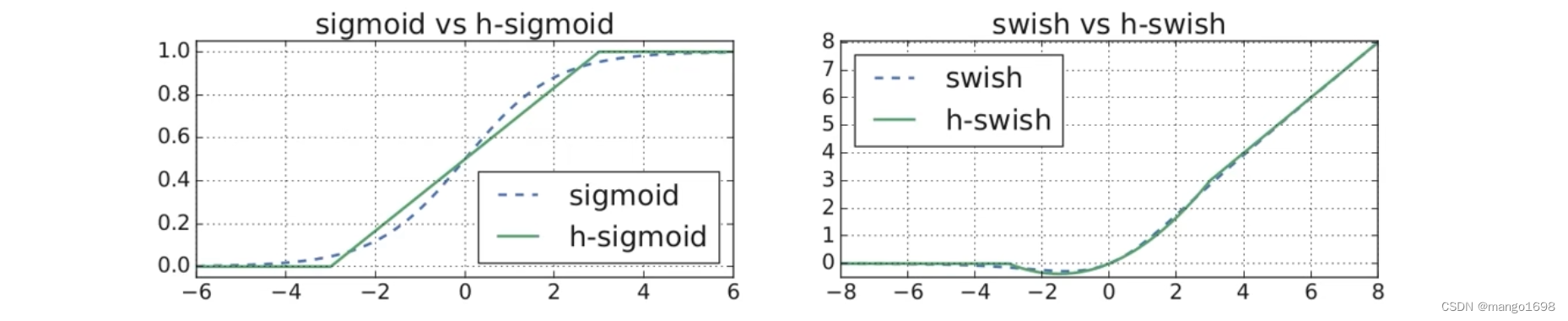
在很多时候,我们会选择使用h-sigmoid激活函数来替换sigmoid激活函数。使用h-swish激活函数来替代h-swish激活函数。
重新设计耗时层结构
1.减少第一个卷积层的卷积核个数(32->16)
2.精简Last Stage
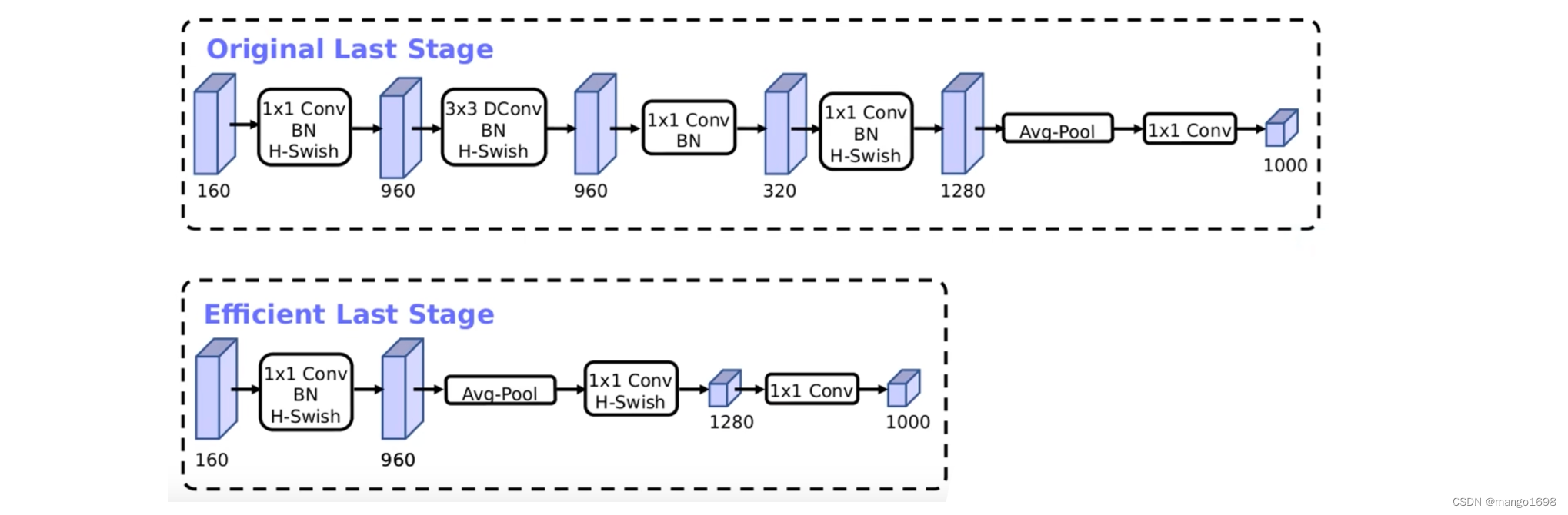
这样调整后,作者发现,在准确率方面没有发生很大的变化,但是节省了7毫秒(占推理过程的11%)的执行时间。
MobileNet V3-Large网络结构
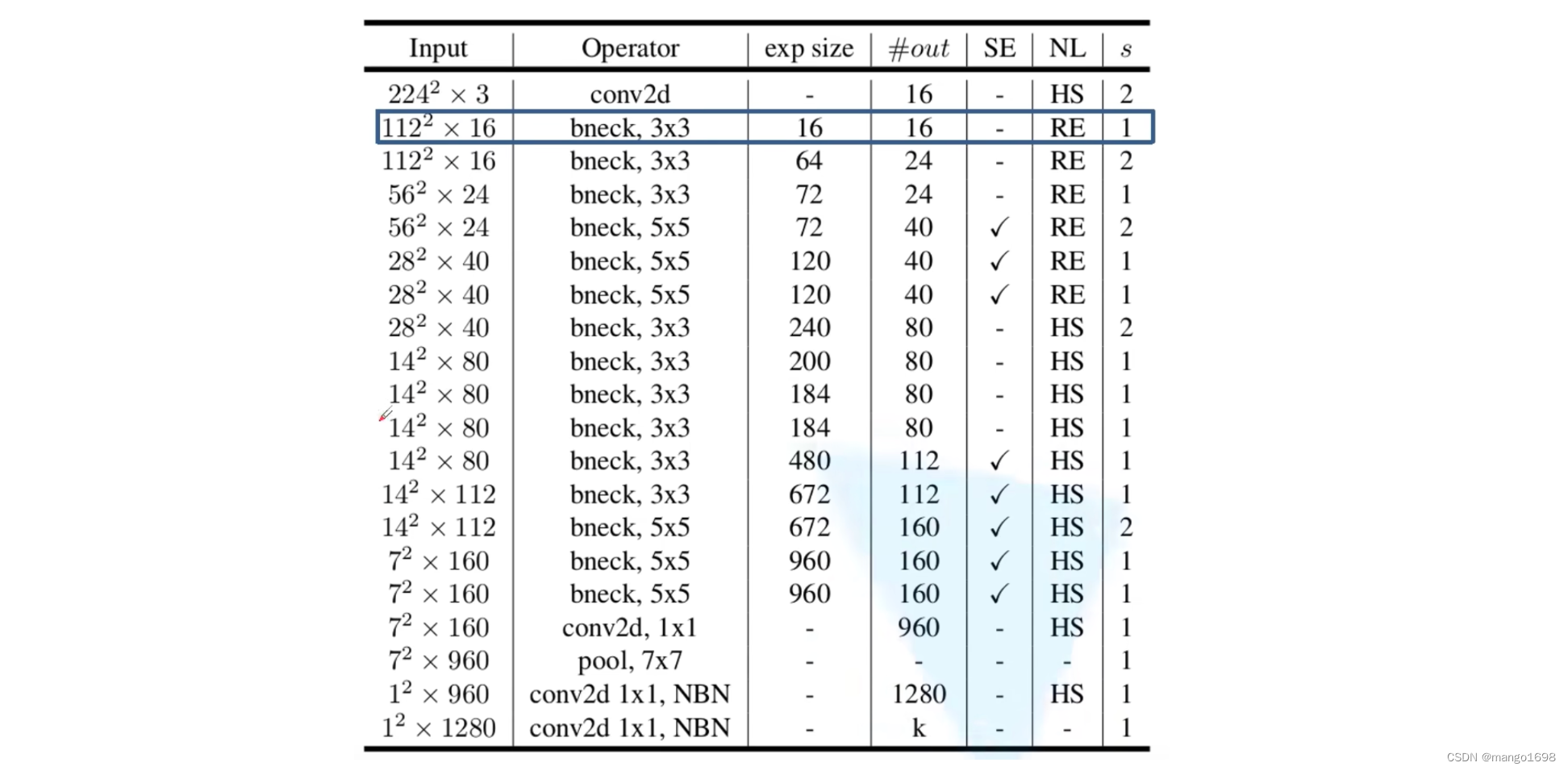
注意:在第一个bneck中,并没有使用
1
×
1
1times1
1×1对卷积进行升维操作。
原文地址:https://blog.csdn.net/weixin_45682053/article/details/135648738
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。
如若转载,请注明出处:http://www.7code.cn/show_61297.html
如若内容造成侵权/违法违规/事实不符,请联系代码007邮箱:suwngjj01@126.com进行投诉反馈,一经查实,立即删除!