本文介绍: 3. 以调试ROS程序为例,可以选择ROS: Attach 或 ROS: Launch。其中,ROS: Attach 表示对一个可执行节点(node) debug,ROS: Launch 表示对一个launch 文件 debug。然后点击这个三角按钮,程序运行,若出现bug, 可自动捕获异常。
具体操作


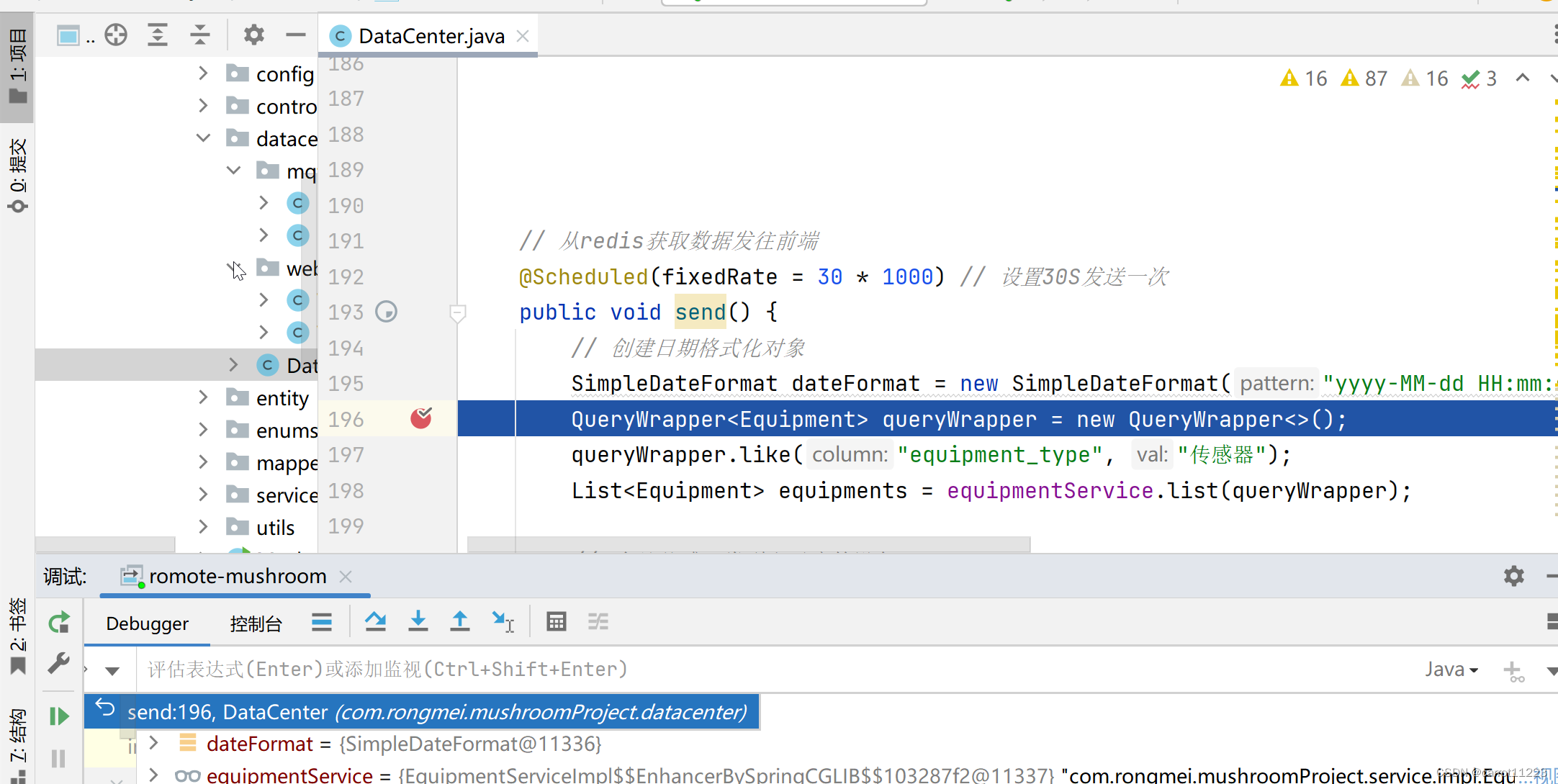
3. 以调试ROS程序为例,可以选择ROS: Attach 或 ROS: Launch。其中,ROS: Attach 表示对一个可执行节点(node) debug,ROS: Launch 表示对一个launch 文件 debug。
然后点击这个三角按钮,程序运行,若出现bug, 可自动捕获异常

声明:本站所有文章,如无特殊说明或标注,均为本站原创发布。任何个人或组织,在未征得本站同意时,禁止复制、盗用、采集、发布本站内容到任何网站、书籍等各类媒体平台。如若本站内容侵犯了原著者的合法权益,可联系我们进行处理。