cartographer离线建图报错: data_.trajectory_nodes.SizeOfTrajectoryOrZero
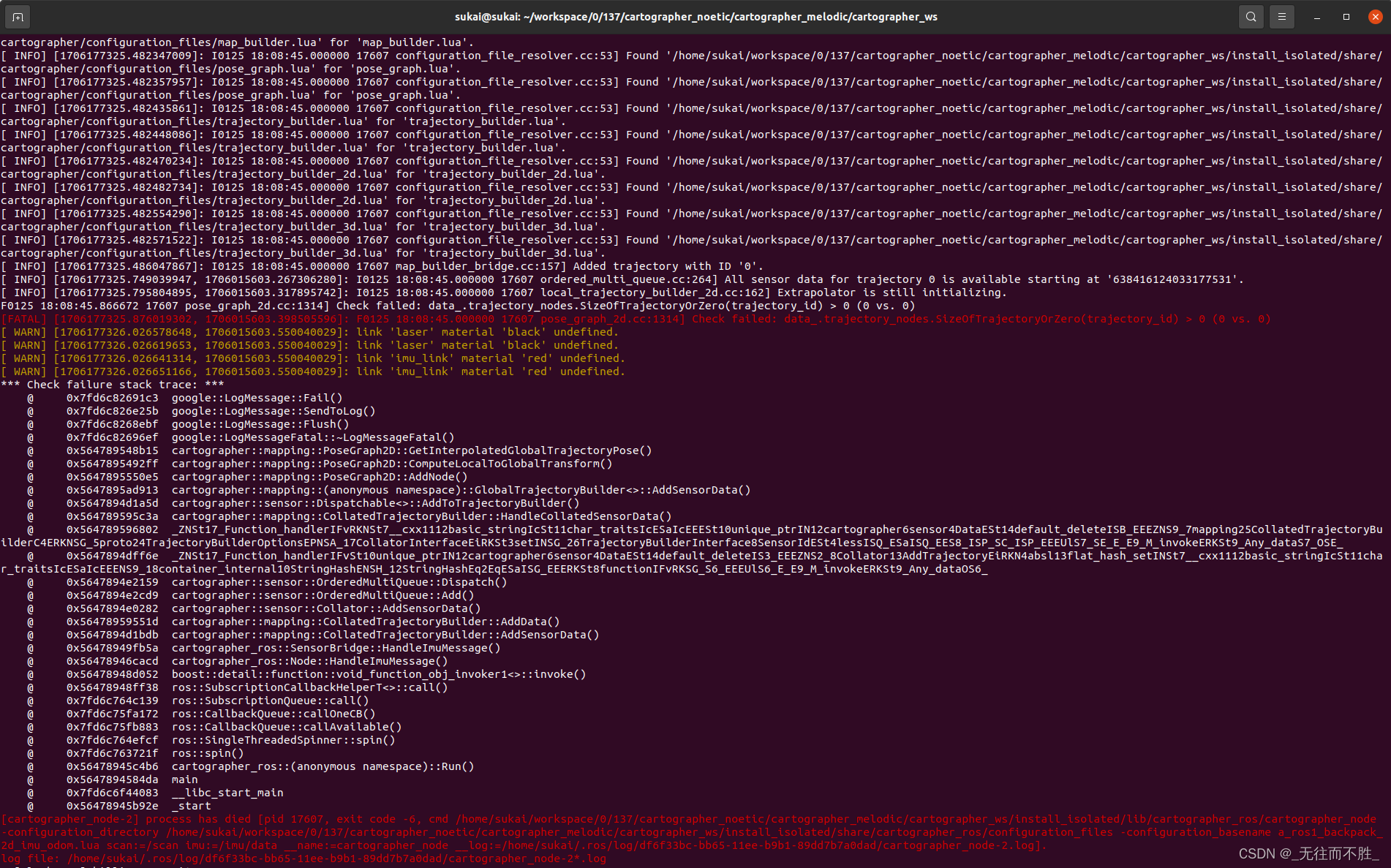
[FATAL] [1706177325.876019302, 1706015603.398505596]: F0125 18:08:45.000000 17607 pose_graph_2d.cc:1314] Check failed: data_.trajectory_nodes.SizeOfTrajectoryOrZero(trajectory_id) > 0 (0 vs. 0)
[cartographer_node-2] process has died [pid 17607, exit code -6, cmd /home/sukai/workspace/0/137/cartographer_noetic/cartographer_melodic/cartographer_ws/install_isolated/lib/cartographer_ros/cartographer_node -configuration_directory /home/sukai/workspace/0/137/cartographer_noetic/cartographer_melodic/cartographer_ws/install_isolated/share/cartographer_ros/configuration_files -configuration_basename a_ros1_backpack_2d_imu_odom.lua sc
原文地址:https://blog.csdn.net/qq_15204179/article/details/135850997
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。
如若转载,请注明出处:http://www.7code.cn/show_62235.html
如若内容造成侵权/违法违规/事实不符,请联系代码007邮箱:suwngjj01@126.com进行投诉反馈,一经查实,立即删除!