本文介绍: 单目测距是通过使用单个摄像头捕获的图像信息俩估计物体的距离。这是一种在计算机领域广泛研究的问题,并且困难之处在于从2d图像中恢复3d信息。单目测距常用的或者是实用方法是相似三角形法。相似三角形法:假设有一个宽度为w的目标的或者物体。然后,我们用相机对物体进行拍照并且测距物体的像素宽度p,相机焦距为f。根据相似三角形得到目标放在距离我们相机为d的位置。
前言
单目测距是通过使用单个摄像头捕获的图像信息俩估计物体的距离。这是一种在计算机领域广泛研究的问题,并且困难之处在于从2d图像中恢复3d信息。
单目测距常用的或者是实用方法是相似三角形法。
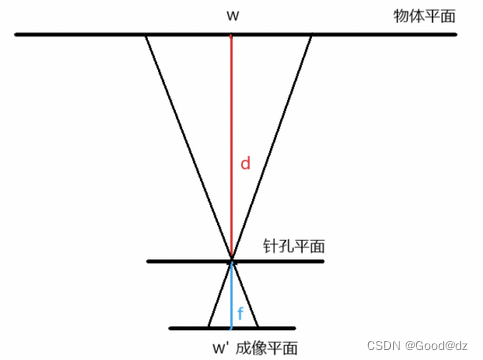
相似三角形法:假设有一个宽度为w的目标的或者物体。然后,我们用相机对物体进行拍照并且测距物体的像素宽度p,相机焦距为f。根据相似三角形得到目标放在距离我们相机为d的位置
d = f * w/p
图像去畸变
图像去畸变是使用相机校准参数来修改图像,进而消除由于镜头的光学因素和相机的构造因素导致的图像畸变。
畸变主要有两种类型:径向畸变和切向畸变。径向畸变是由于透镜的形状导致光线弯曲的比例变化,使得图像看起来像在水面下观察物体。切向畸变则是由于透镜和成像平面之间的不平行导致的。

一般情况下,从摄像头或图像文件中读取的原始图像都包含一定的畸变,取决于具体的摄像头和镜头参数。因此,直接读取的图像是原始的,畸变的。
在进行单目测距或者其他涉及准确的空间量测的计算机视觉任务中,预处理步骤通常会包括一个图像去畸变(undistortion)的步骤。原因是摄像头的镜片畸变会扭曲图像,在图像上测得的距离可能会因此产生偏差。对图像进行去畸变可以提高测量结果的准确性。
因此,进行单目测距通常会需要一个去畸变的步骤。你需要摄像头的校准参数才能正确地去除畸变。在OpenCV中,这通常通过cv::undistort()函数来进行,需要提供摄像头的内参矩阵和畸变系数。
单目测距代码
1、基于实际物体的高度或者宽度的单目测距
单目测距使用的方法大多数是通过参照物,即已知实际物体的高度或者宽度来进行测距。但是这种方法的缺点必须要已经实际物体的高度或者宽度。
2、基于相机安装高度的单目测距
相机
参考链接:
1、https://zhuanlan.zhihu.com/p/642601409
声明:本站所有文章,如无特殊说明或标注,均为本站原创发布。任何个人或组织,在未征得本站同意时,禁止复制、盗用、采集、发布本站内容到任何网站、书籍等各类媒体平台。如若本站内容侵犯了原著者的合法权益,可联系我们进行处理。





