本文介绍: 近年来,实车自动驾驶技术迎来了飞速的发展,成为科技和汽车行业的焦点之一

🎬 鸽芷咕:个人主页
🔥 个人专栏:《linux深造日志》《粉丝福利》
⛺️生活的理想,就是为了理想的生活!
⛳️ 推荐
引言
步骤一:自动驾驶准备
1. 启动 CAN 卡
步骤二:启动并打开 Dreamview+

2. 启动 Dreamview+
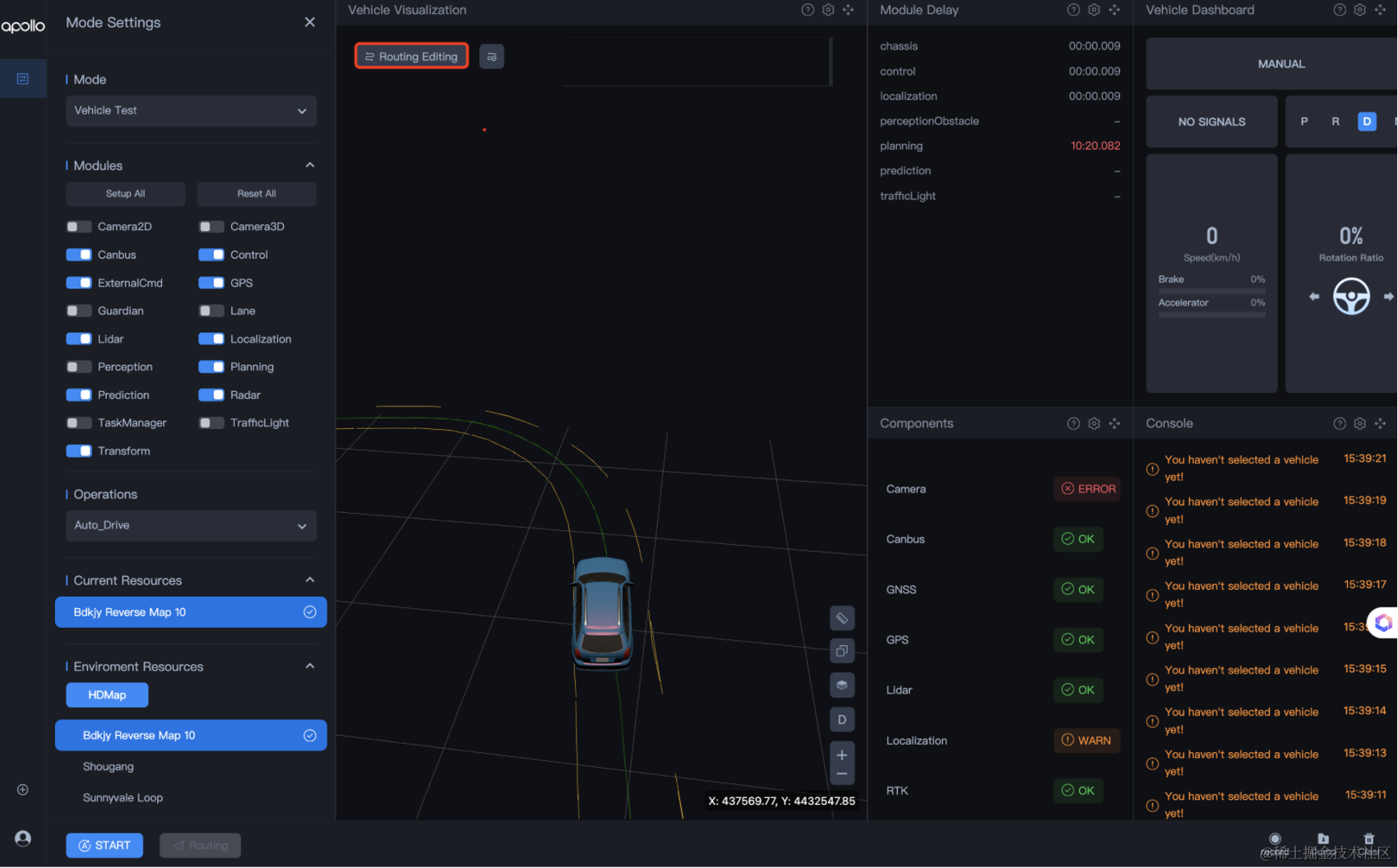
3. 选择模式和操作
4. 选择车辆和地图
5. 打开所需要的模块
6. 查看连接状态



7. 编辑行驶路线


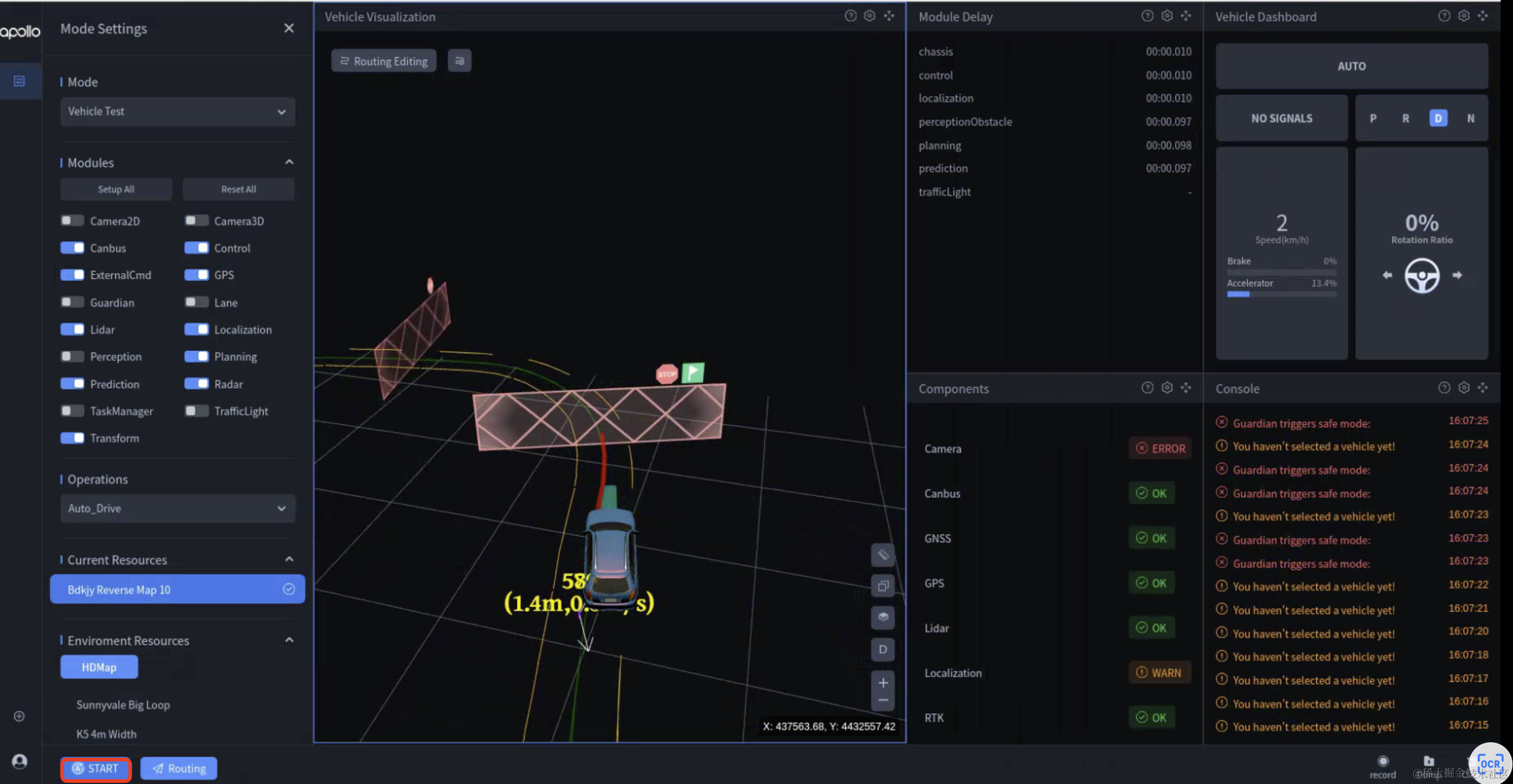
步骤二:启动自动驾驶
声明:本站所有文章,如无特殊说明或标注,均为本站原创发布。任何个人或组织,在未征得本站同意时,禁止复制、盗用、采集、发布本站内容到任何网站、书籍等各类媒体平台。如若本站内容侵犯了原著者的合法权益,可联系我们进行处理。