1.前言
开发初期学习了下面博主的文章,也报了他在古月局的课,相当于感谢吧。
ROS Qt5 librviz人机交互界面开发一(配置QT环境)-CSDN博客r
GitHub – chengyangkj/Ros_Qt5_Gui_App at simple
想要开发相关软件的肯定也都发现网上关于RosQT编程的学习资料很少,librviz的资料更少,而且很多也都是复制粘贴别人的。编写这个软件花了很多功夫,包括如何导入ros库,写cmake,看rviz源码。前期想把一个RosQT工程编译出来都花了很长时间。
2.开发环境
3.功能介绍
主界面
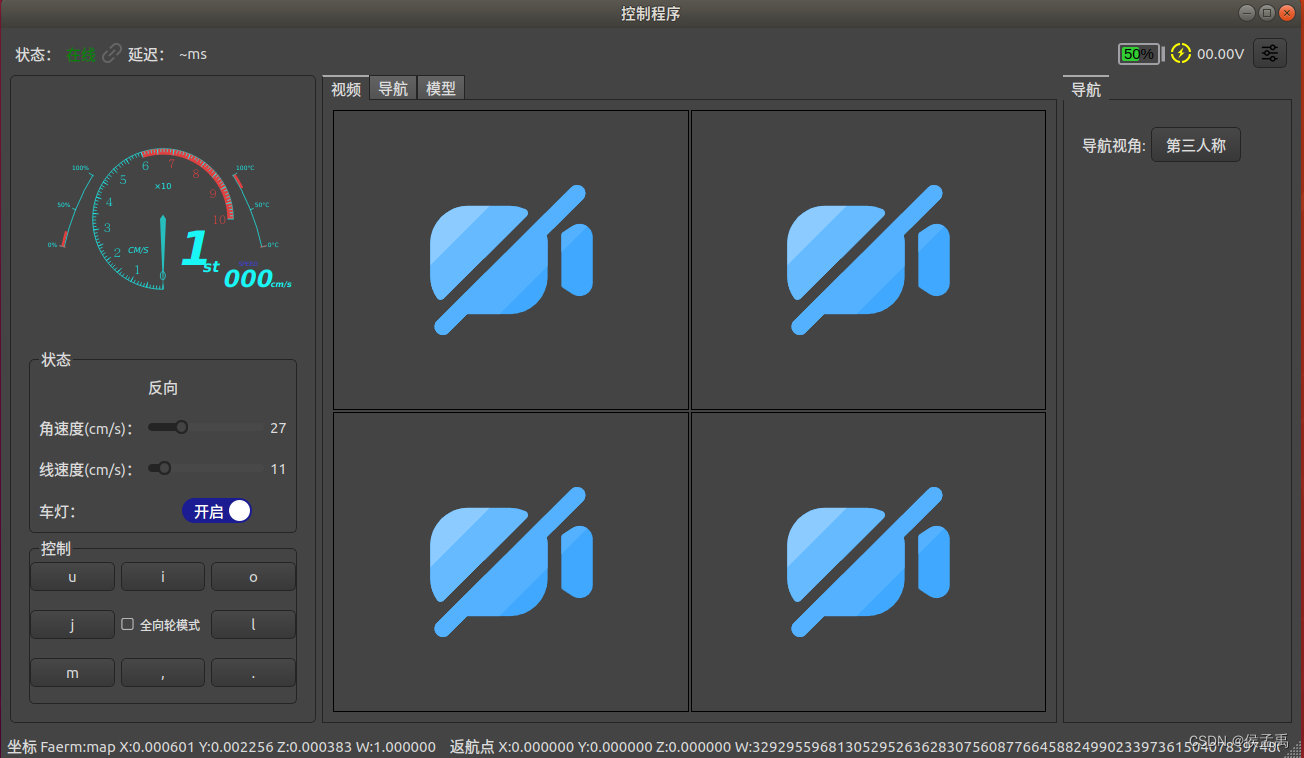
RTSP视频拉取


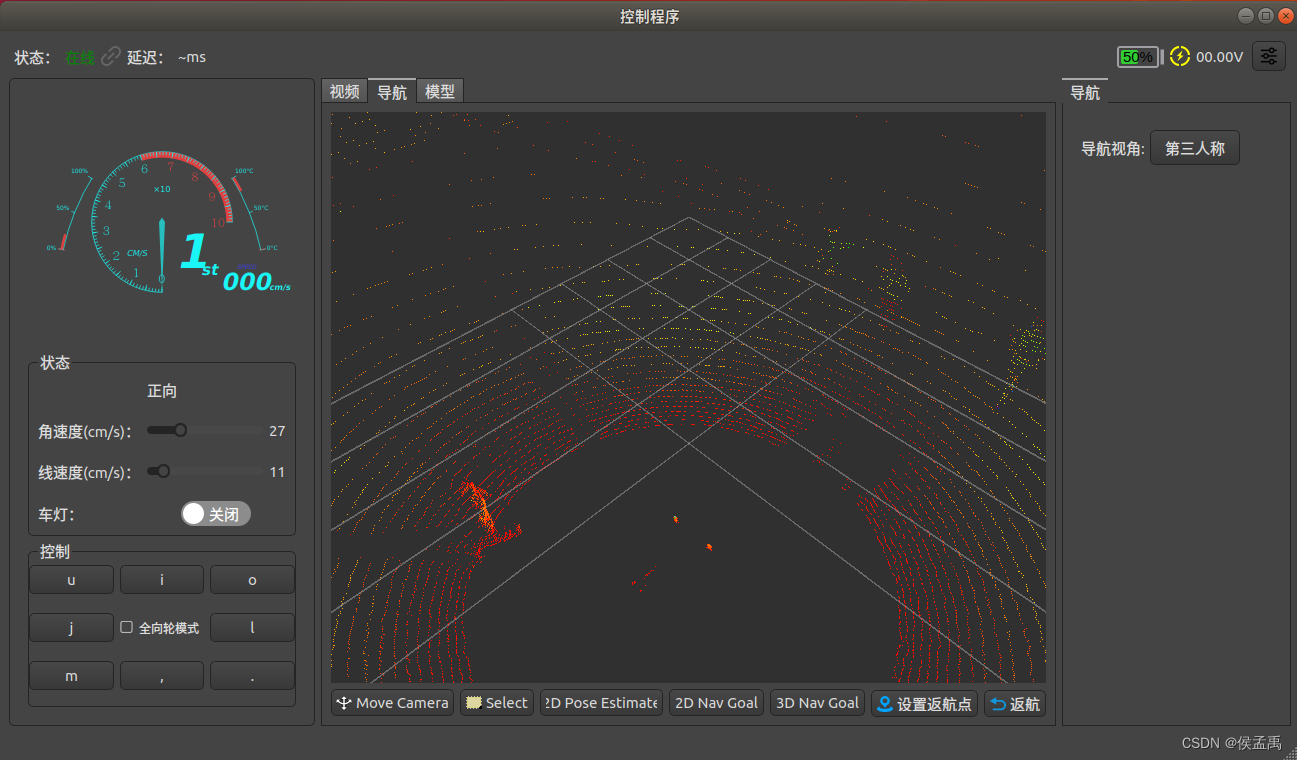
建图与导航

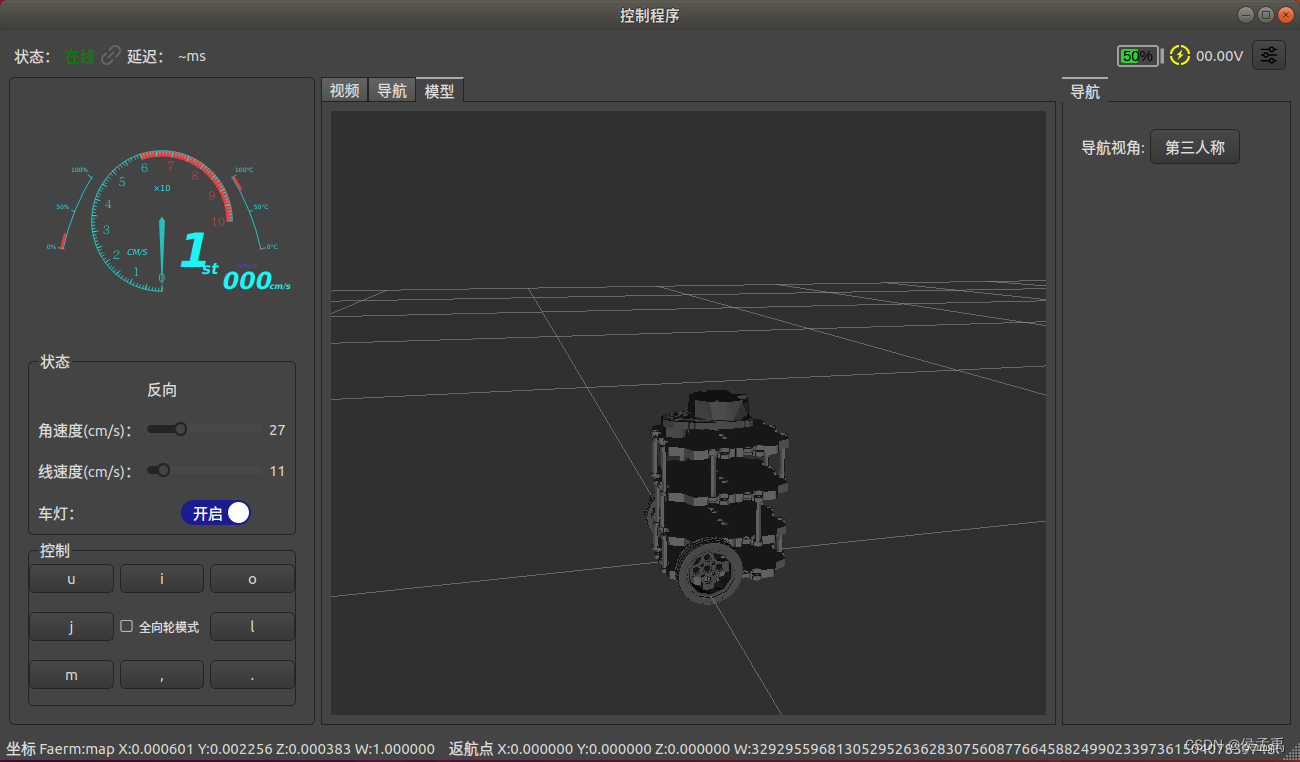
模型显示
设置选项
基础设置

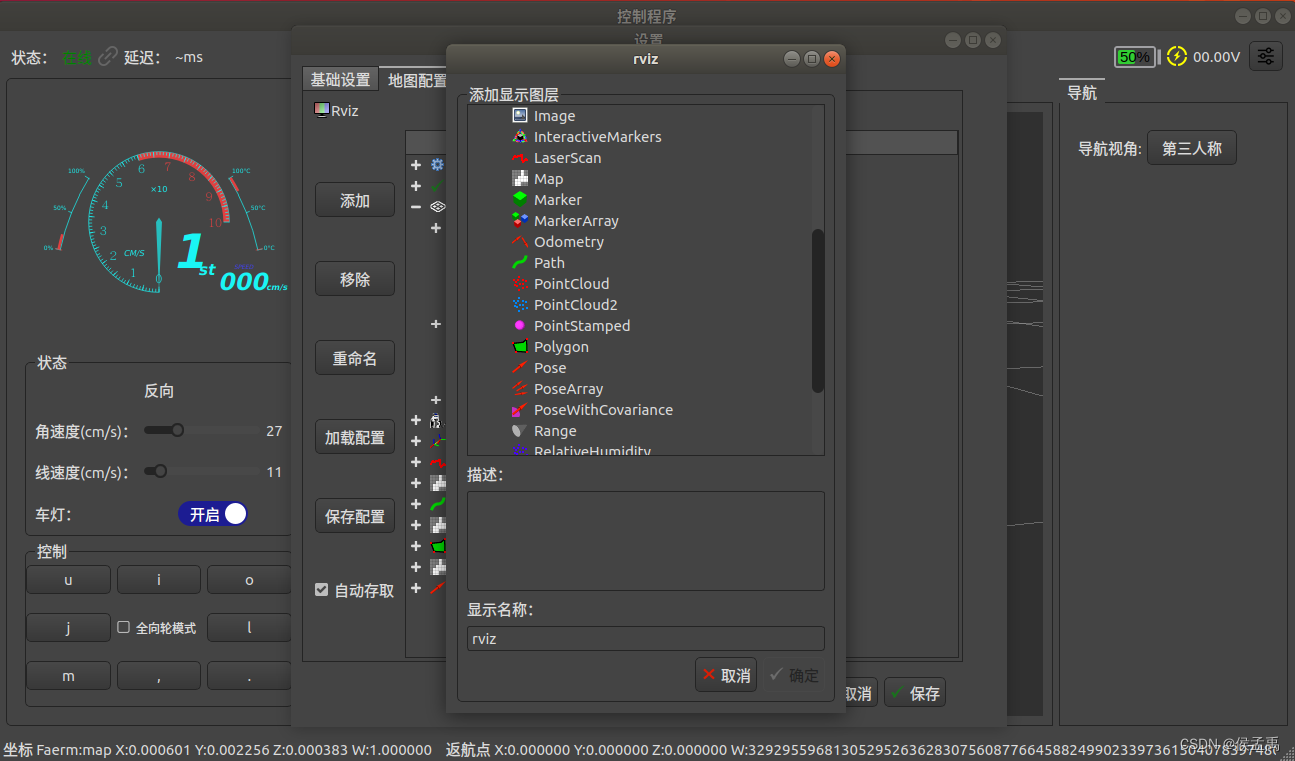
rviz地图配置

视角设置

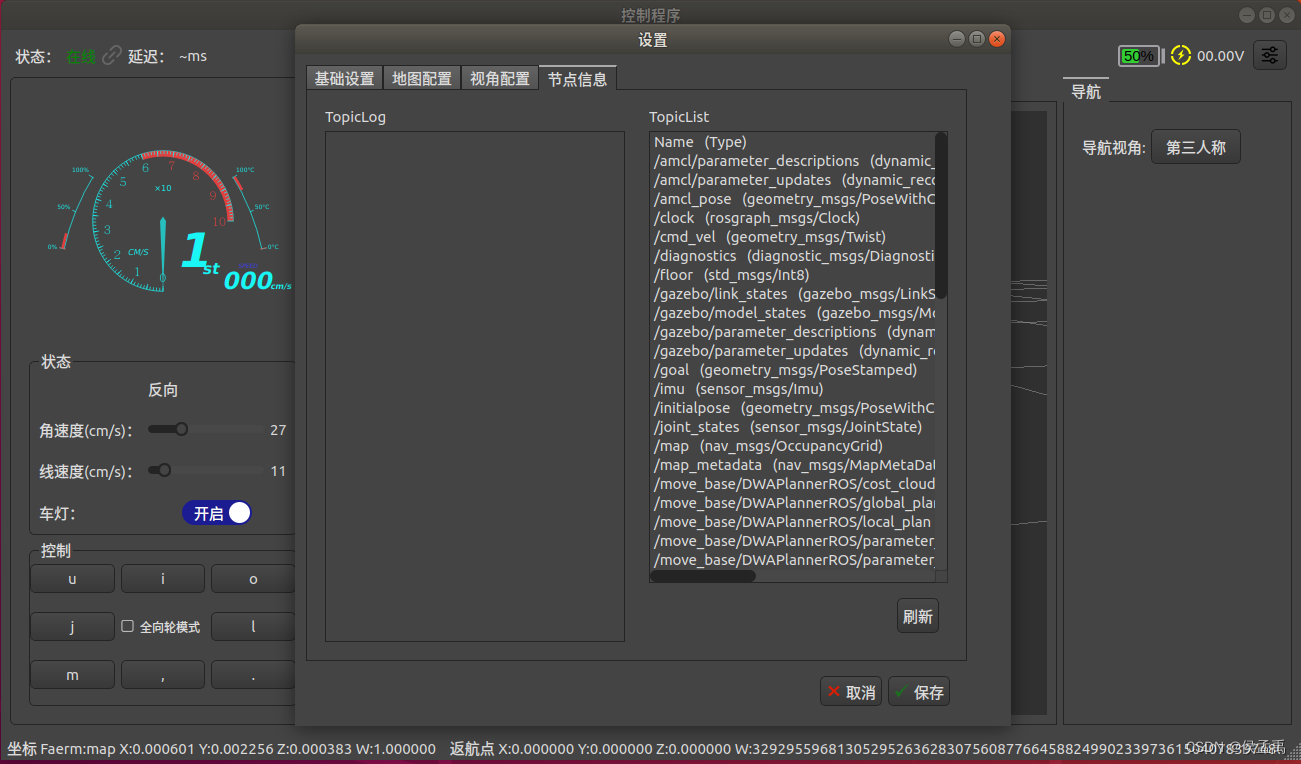
节点信息
声明:本站所有文章,如无特殊说明或标注,均为本站原创发布。任何个人或组织,在未征得本站同意时,禁止复制、盗用、采集、发布本站内容到任何网站、书籍等各类媒体平台。如若本站内容侵犯了原著者的合法权益,可联系我们进行处理。