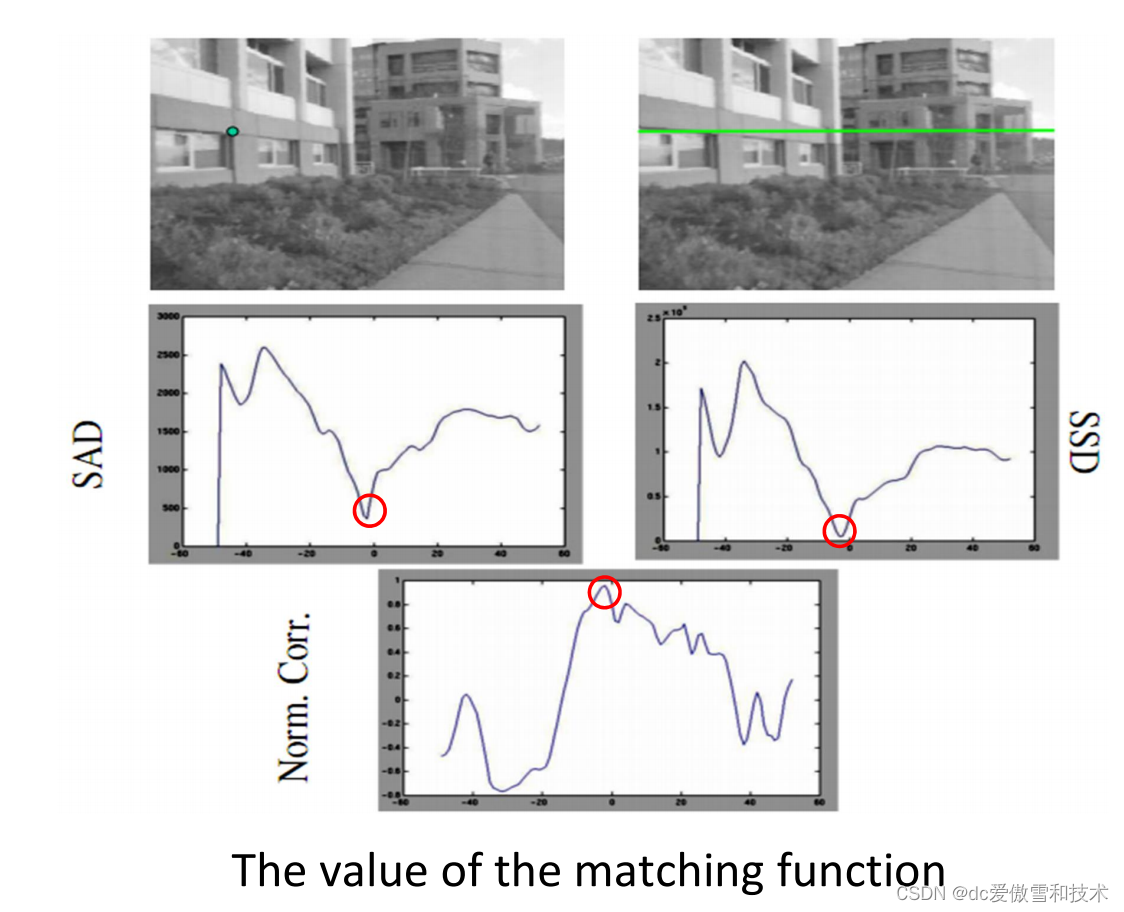
本文介绍: SSD和SAD都是衡量图像间相似度的有效方法,但它们各有优势和局限性。SSD更适用于低噪声图像,能够强调大的像素差异,但在噪声较多的情况下可能不理想。SAD在处理噪声图像时表现更好,但可能对某些重要的像素变化不够敏感。选择哪种匹配函数取决于具体的应用场景和图像特性,以及处理速度的要求。在某些硬件架构上,SAD的计算可能比SSD更快。您提到了相关性(Correlation)和归一化相关性(Normalized Correlation)这两种用于立体匹配的方法。
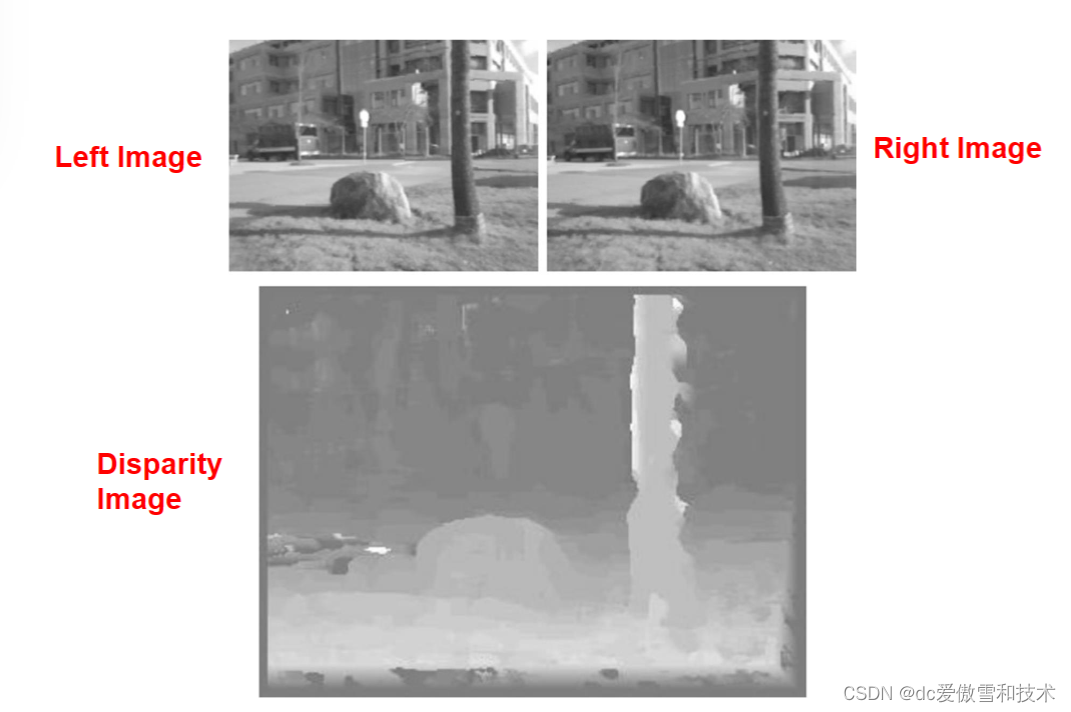
1.视差
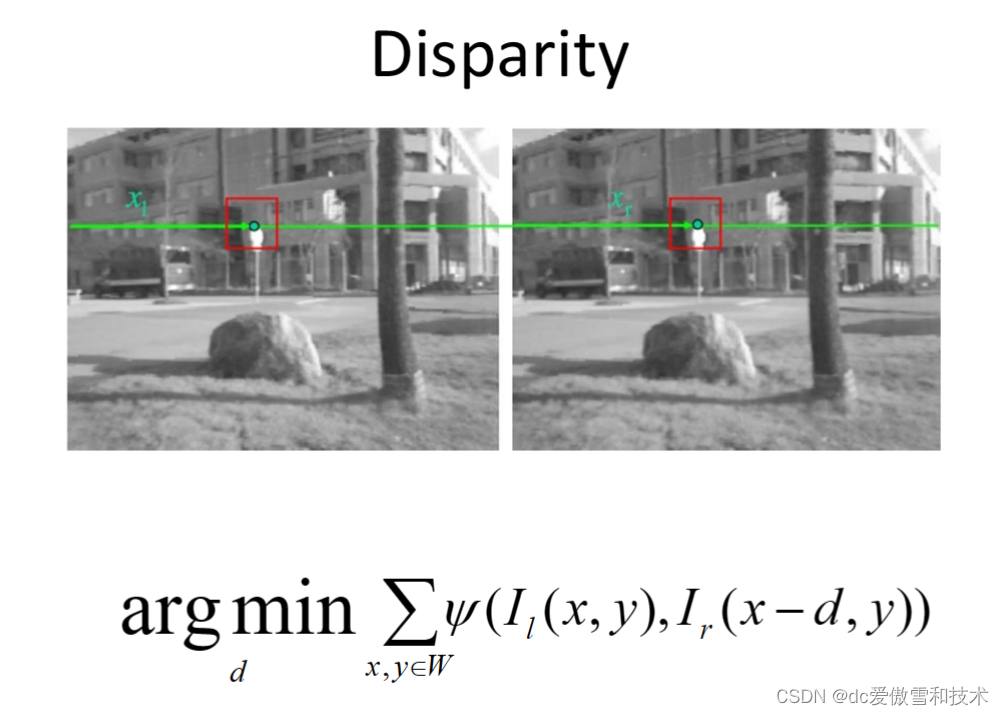
2.立体匹配

总的来说,这个立体匹配方法是通过比较左图像中的一个窗口和右图像中相应平移的窗口来寻找最佳匹配视差的一种经典方法。它在众多应用中被广泛使用,如3D重建、机器人导航等。
匹配函数
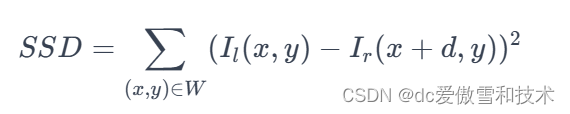
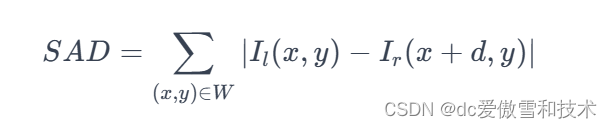
在立体视觉中,为了找到两个图像间的对应像素,通常会使用不同的匹配函数来计算像素间的相似度。您提到的两种匹配函数,SSD(平方差之和)和SAD(绝对差之和),都是用来衡量两幅图像中对应窗口内像素差异的常见方法。让我们详细分析这两种函数:
1. SSD(Sum of Squared Differences)
2. SAD(Sum of Absolute Differences)
总结
您提到了相关性(Correlation)和归一化相关性(Normalized Correlation)这两种用于立体匹配的方法。让我们分析这两种方法的定义、特点和应用场景。
3. 相关性(Correlation)

4. 归一化相关性(Normalized Correlation)

总结
总结
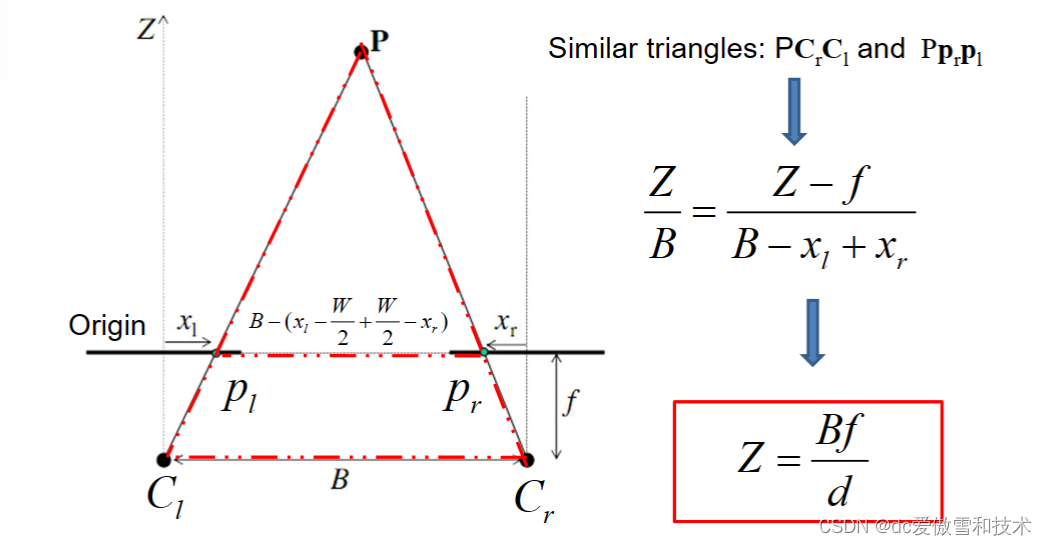
“视差是深度的倒数”这一概念是立体视觉领域的基础,它表明物体到摄像机的距离越近,其在双目图像中的视差就越大。这个原理在多个领域有着广泛的应用,特别是在需要精确深度信息的场景中。通过分析视差,可以获取有关场景和物体的三维信息,这对于许多计算机视觉应用至关重要。
匹配算法实现

这个算法的目标是在一对双目图像中为每个像素找到最佳匹配视差。让我们逐步分析这个算法的实现和关键点:
算法概述
算法的优化
总结
函数功能
主要步骤
使用示例
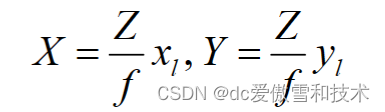
3.恢复场景点的3D坐标
声明:本站所有文章,如无特殊说明或标注,均为本站原创发布。任何个人或组织,在未征得本站同意时,禁止复制、盗用、采集、发布本站内容到任何网站、书籍等各类媒体平台。如若本站内容侵犯了原著者的合法权益,可联系我们进行处理。