本文介绍: 一般来说,这个模型只是对象的输入输出特性在某种准则意义下的一种近似,挖的程度取决于人们对系统先验知识的认识深化程度和对数据集合性质的了解,以及所选用的辨识方法是否合理。而最小二乘法基于误差平方和最小的原则,通过最小化观测数据与模型输出之间的误差平方和来估计系统参数。在系统参数辨识中,最小二乘法通常假设观测数据与模型输出之间存在线性关系,并通过最小化观测数据与模型输出之间的误差平方和来估计系统参数。分别对比基于极大似然法的系统参数辨识以及基于最小二乘法的系统参数辨识,输出起参数辨识收敛曲线以及辨识误差。
目录
1.程序功能描述
2.测试软件版本以及运行结果展示

3.核心程序
4.本算法原理
1.极大似然法系统参数辨识

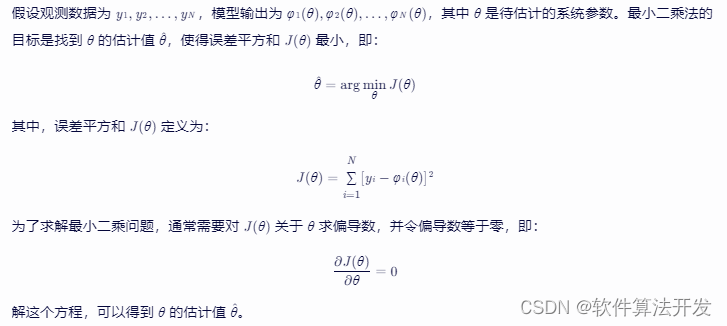
2. 最小二乘法系统参数辨识
5.完整程序
声明:本站所有文章,如无特殊说明或标注,均为本站原创发布。任何个人或组织,在未征得本站同意时,禁止复制、盗用、采集、发布本站内容到任何网站、书籍等各类媒体平台。如若本站内容侵犯了原著者的合法权益,可联系我们进行处理。