本文介绍: 遥感图像通过亮度值或像元值的高低差异(反映地物的光谱信息)及空间变化(反映地物的空间信息)来表示不同地物的差异,这是区分不同图像地物的物理基础。遥感图像分类就是利用计算机通过对遥感图像中各类地物的光谱信息和空间信息进行分析,选择特征,将图像中每个像元按照某种规则或算法划分为不同的类别,然后获得遥感图像中与实际地物的对应信息,从而实现遥感图像的分类。
遥感的最终成果之一就是从遥感图像上获取信息,遥感分类是获取信息的重要手段。同时遥感图像分类也是目前遥感技术中的热点研究方向,每年都有新的分类方法推出。
本小节主要内容:
1 遥感分类概述
遥感图像通过亮度值或像元值的高低差异(反映地物的光谱信息)及空间变化(反映地物的空间信息)来表示不同地物的差异,这是区分不同图像地物的物理基础。遥感图像分类就是利用计算机通过对遥感图像中各类地物的光谱信息和空间信息进行分析,选择特征,将图像中每个像元按照某种规则或算法划分为不同的类别,然后获得遥感图像中与实际地物的对应信息,从而实现遥感图像的分类。
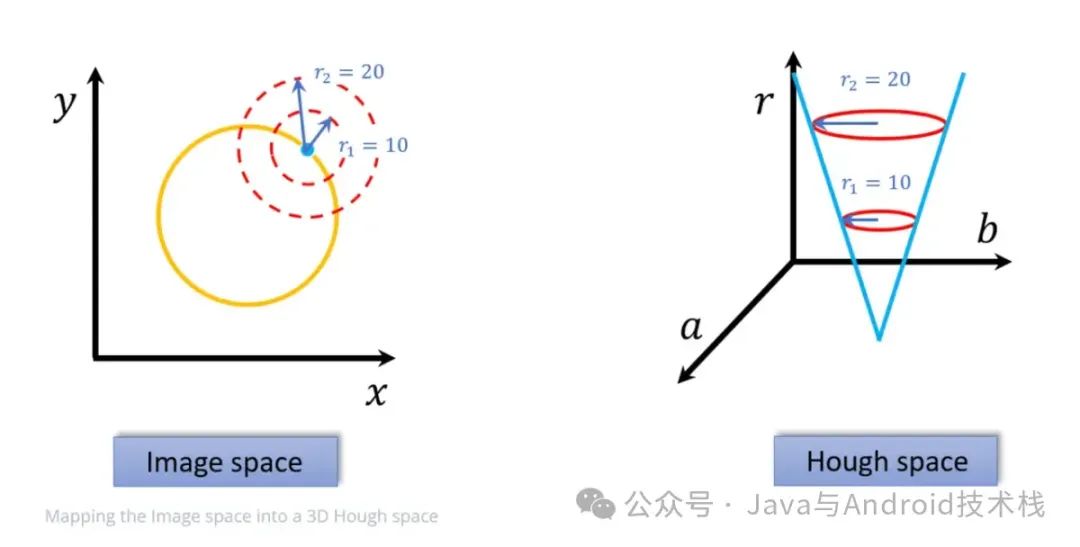
不同的地物具有不同的波谱特征,同类的地物具有相似的波谱特征,由不同探测波段组成的多波段数字图像是地物特征的量化,遥感图像分类正是基于图像中所反映的同类地物的光谱相似性和异类地物的光谱差异性的基础上进行的,根据图像的特征向量,建立判别函数,最终实现将遥感图像自动分成若干地物类型。遥感图像分类由于遥感图像的数据量大和成像复杂等特点,使得遥感图像具有一些特点和原则。
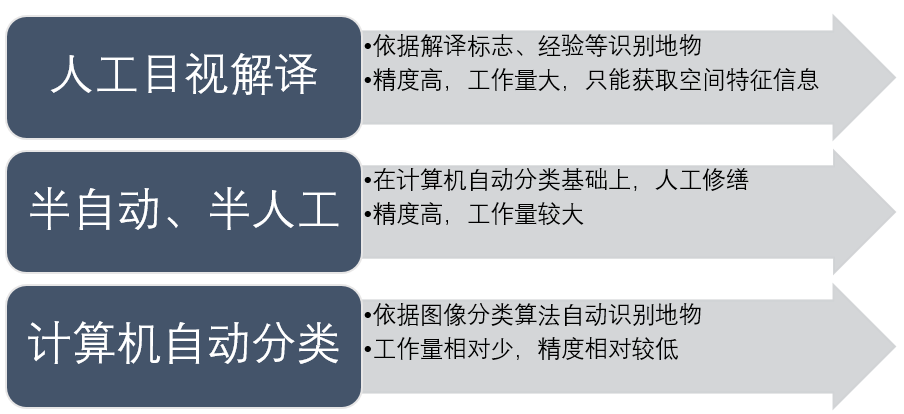
遥感图像分类比起一般的数字图像分类具有自身的特点,概况来讲遥感图像分类的特点有如下几点:
(1)数据量大。遥感图像通常具有较多的光谱波段,每个像元在不同波段具有不同的波谱特征,所以遥感图像分类是处理多波段的运算。
2 基于光谱的计算机分类
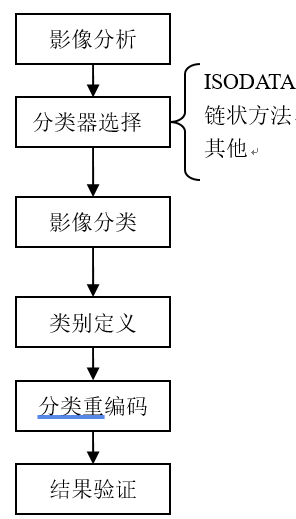
(1) 非监督分类
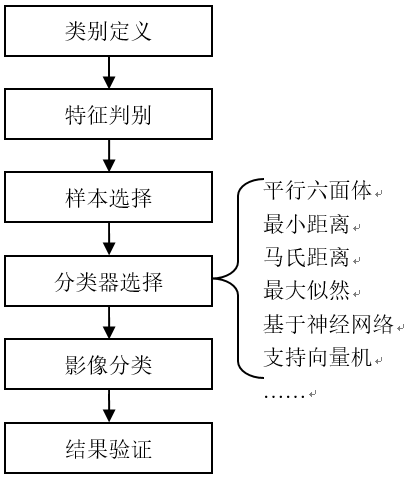
(2) 监督分类
3 基于专家知识的决策树分类

4 面向对象图像分类

5 深度学习图像分类
6 总结
声明:本站所有文章,如无特殊说明或标注,均为本站原创发布。任何个人或组织,在未征得本站同意时,禁止复制、盗用、采集、发布本站内容到任何网站、书籍等各类媒体平台。如若本站内容侵犯了原著者的合法权益,可联系我们进行处理。