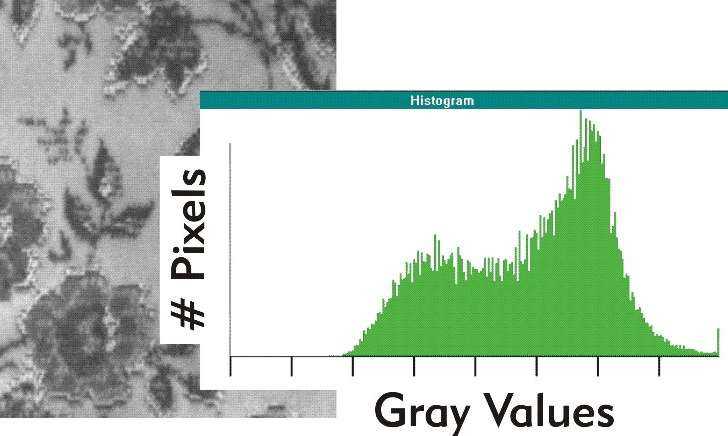
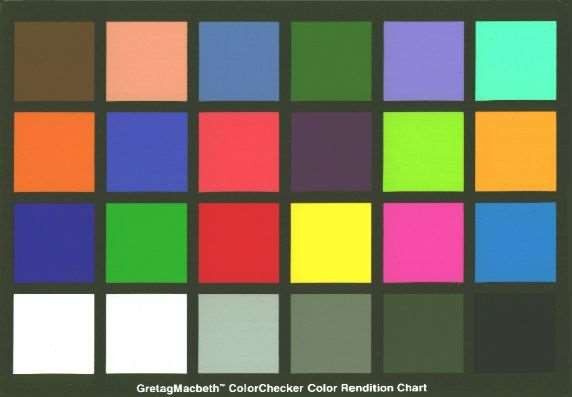
本文介绍: 光度计的传感器放置在场景的中心,并读出测量的光的值。对于非常大的视野,可能有必要借助于纸张或布料的背景,但期望这些产品的制造商控制其产品的反射率是不切实际的,并且测量的再现性也会受到影响。应该注意的是,改变镜头的f数,虽然一个非常容易的选择,以获得灰度直方图匹配,但这是不可取的。本文所描述的基准是在工作良好的视觉系统上执行的,那么如果视觉系统需要维护,或者再现视觉系统的成像,维护技术人员或视觉工程师可以按照基准记录文档及SOP执行他们的任务,保证他们将视觉系统恢复或构建到与早期合格的视觉系统相当的性能。
开发视觉系统的一个重要活动是验证其部署是否符合工程规范。一个成功的视觉应用程序的两个特点是它无需工程师干涉情况下正常工作了多长时间,以及它的维护和复制部署是多么简易。实现所有如上所述目标的一个关键步骤是确定视觉系统的基准。
在这里使用的上下文中,基准是对所需系统特性的度量或指示。在本文的范围内,有两个领域应加以基准:
其中,我们通过视觉软件获取和存储图像后,可对图像基准项目进行离线分析。
视觉系统首次开发时,视觉工程师进行测试,以确保组件按预期执行。这些测试帮助视觉工程师建立系统基准,以验证视觉系统在准备调试时的性能,并供今后参考。
当视觉系统进行维护时,技术人员可以重新检查系统基准项目,并将它们与既定的基准进行比较。这使技术人员能够确定是否发生了重大变化,以及在哪里发生了这些变化,因此在必要时采取了适当的纠正措施。它还避免了技术人员盲目变化系统配置,导致的一系列系统功能退化。如果没有基准,即使是经验丰富的视觉工程师也无法确保视觉系统恢复到原来的运行状态。
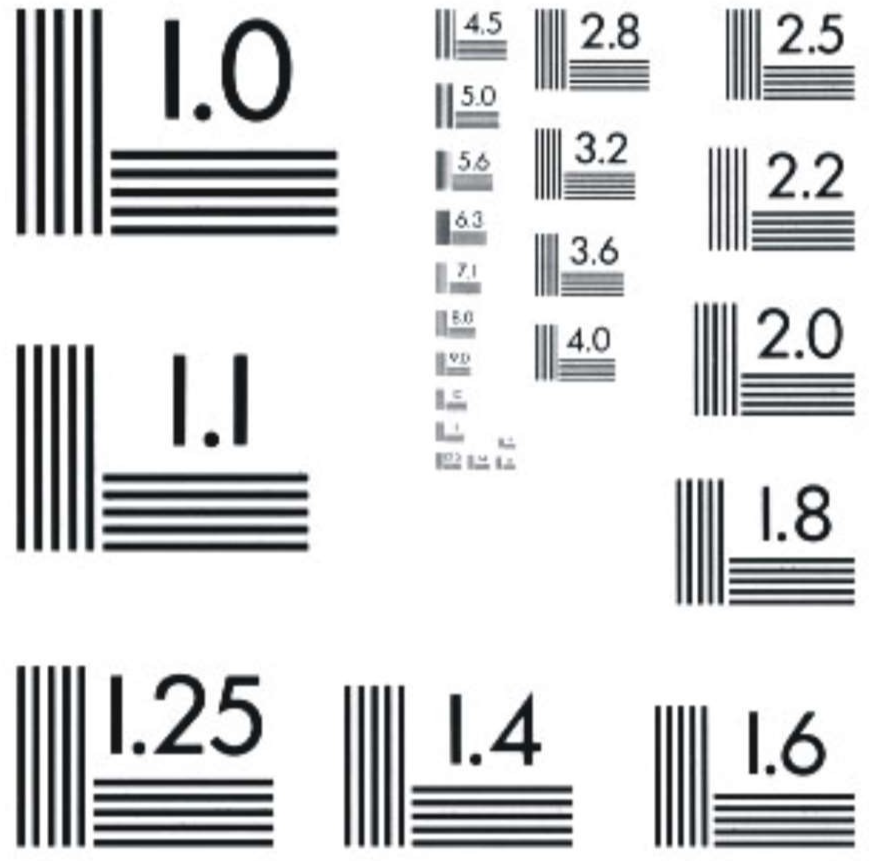
基准测试确实需要使用特定的工具,如测试图形。其中一些工具可能是特定于应用程序的,而另一些工具可能更通用。基准测试不是一个便于系统调整或校准的过程;系统的调整和校准必须在基准测试之前执行。由于基准测试不是校准,因此它不需要像校准/测量的任务,严格遵照国际标准的可追溯性,有些工具(如测试图形)可以通过现有技术(例如激光打印机)购买或创建。然而,这些工具必须有适当的材料,避免基准工具在视觉系统的使用寿命内发生变形或改变。维护基准工具是视觉系统团队的额外责任。





声明:本站所有文章,如无特殊说明或标注,均为本站原创发布。任何个人或组织,在未征得本站同意时,禁止复制、盗用、采集、发布本站内容到任何网站、书籍等各类媒体平台。如若本站内容侵犯了原著者的合法权益,可联系我们进行处理。