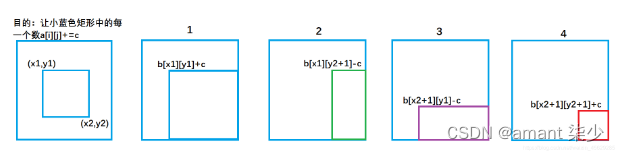
本文介绍: 然后,使用矩阵的每个元素中的最小值作为我们的成本矩阵 C 的最终值。M ∈ R2×2 是包含仿射矩阵 a 的尺度和旋转部分的矩阵,并且 T 包含平移部分。在许多复杂的场景中,预测边界框的正确位置可能会由于相机运动而失败,这导致2个相关边界框之间的重叠率低,最终导致跟踪器性能低下。实际测试发现步骤 2 的提升是很大的,尤其是对突然发生抖动场景(如车子过减速带,急刹车等)。在经过上述式子更新过后,我们可以得到计算相机运动补偿后的目标状态与增益,此时把相应的 X,P 进行卡尔曼滤波的更新步骤。
一、前言
二、简介
Tracking-by-detection 成为 MOT 任务中最有效的范式。Tracking-by-detection 包含一个步骤检测步骤,然后是一个跟踪步骤。跟踪步骤通常由2个主要部分组成:
(1)运动模型和状态估计,用于预测后续帧中轨迹的边界框。卡尔曼滤波器 (KF) 是此任务的主流选择。
(2)将新帧检测与当前轨迹集相关联。对于步骤2:有2种主要的方法用于处理关联任务:
在许多复杂的场景中,预测边界框的正确位置可能会由于相机运动而失败,这导致2个相关边界框之间的重叠率低,最终导致跟踪器性能低下。
作者通过采用传统的图像配准来估计相机运动,通过适当地校正卡尔曼滤波器来克服这个问题。这里将此称为相机运动补偿(CMC)。
三、改进思路
3.1、状态定义





3.2、相机运动补偿




3.3、iou和ReID融合



3.4、改进总结

四、相机运动补偿



声明:本站所有文章,如无特殊说明或标注,均为本站原创发布。任何个人或组织,在未征得本站同意时,禁止复制、盗用、采集、发布本站内容到任何网站、书籍等各类媒体平台。如若本站内容侵犯了原著者的合法权益,可联系我们进行处理。