本文介绍: 此类信息对于诸如在相机扫描静态场景和虚拟相机中的动画时启用运动视差等任务非常有用,但是,当强调场景中的特定对象进行 3D 建模时,该信息在目前的技术水平下相对不足且不准确。但随着LiDAR、RGB-D 相机(RealSense、Kinect)和3D扫描仪等3D传感器的普及和价格的降低,3D 采集技术的最新进展取得了巨大飞跃。是分布在 3D 空间中的三维点的集合。下面是一张椅子的参考,其中包含来自ShapeNet的图像,ShapeNet 是一个注释丰富的大型形状存储库,由对象的 3D CAD 模型表示。
一、简述
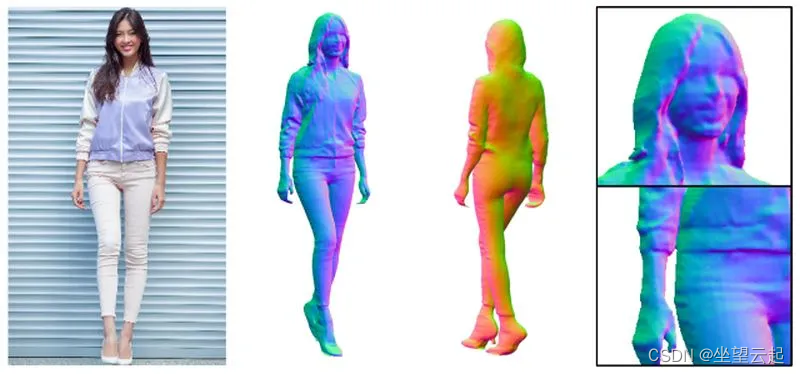
从单一角度而自动合成3D数据是人类视觉和大脑的基本功能,这对计算机视觉算法来说是比较难的。但随着LiDAR、RGB-D 相机(RealSense、Kinect)和3D扫描仪等3D传感器的普及和价格的降低,3D 采集技术的最新进展取得了巨大飞跃。与广泛使用的 2D 数据不同,3D 数据具有丰富的尺度和几何信息,从而为机器理解提供了更广泛的机会。
然而,与2D数据相比,3D数据的可用性相对较低,且获取成本较高。因此,最近提出了许多深度学习方法来从可用的 2D 数据合成 3D 数据,而不依赖于任何3D传感器。但在深入研究这些方法之前,先了解处理3D数据的格式。
合成的三维数据可以根据数据的最终用途,而使用不同的格式表示。
一些常见的格式是:深度图像、点云、体素、网格、多视图图像、基于图元的CAD模型。
从研究的角度来看,每种类型的数据格式都有自己的属性,这些属性给深层架构设计带来了挑战,同时也为新颖高效的解决方案提供了机会。每种表示形式都适合自己的应用场景。
二、深度图像
RGB-D 图像是包含
原文地址:https://blog.csdn.net/bashendixie5/article/details/134672671
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。
如若转载,请注明出处:http://www.7code.cn/show_9495.html
如若内容造成侵权/违法违规/事实不符,请联系代码007邮箱:suwngjj01@126.com进行投诉反馈,一经查实,立即删除!
声明:本站所有文章,如无特殊说明或标注,均为本站原创发布。任何个人或组织,在未征得本站同意时,禁止复制、盗用、采集、发布本站内容到任何网站、书籍等各类媒体平台。如若本站内容侵犯了原著者的合法权益,可联系我们进行处理。